VA Motion Controller Programming Manual
623
4. Example Configuration
Process describes the software configuration of the bus when the motion controller using the
Vector CANopen servo, configuration process is as follows:
4.1 Motion Control Shaft Arranged
The main job is to process the configuration data PDO, network synchronization period,
following the second package module through the gradual movement of the shaft describes the
configuration process, the process of configuring a servo, the node number is 1.
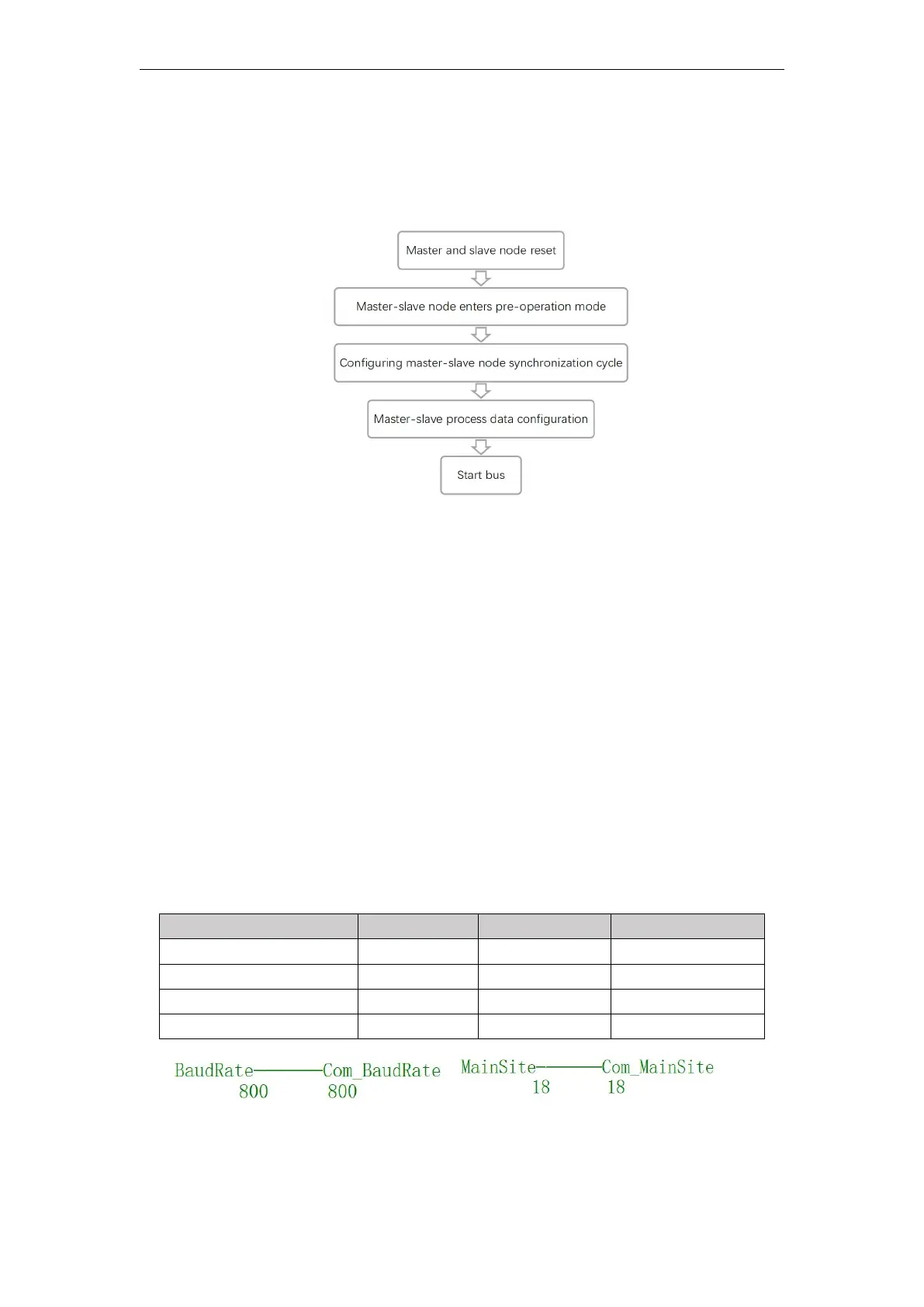
4.1.1 Communication Configuration
According to the hardware topology to build a good network, start building communication:
1, the slave set, the servo P08.41 = 1 (node number), P08.40 = 800 (baud rate);
2, the master station is provided, the motion controller in the master station 18 is the default
number, register address:% MB3.4012, communication baud rate register address:% MW3.4013,
set up as follows