VA Motion Controller Programming Manual
133
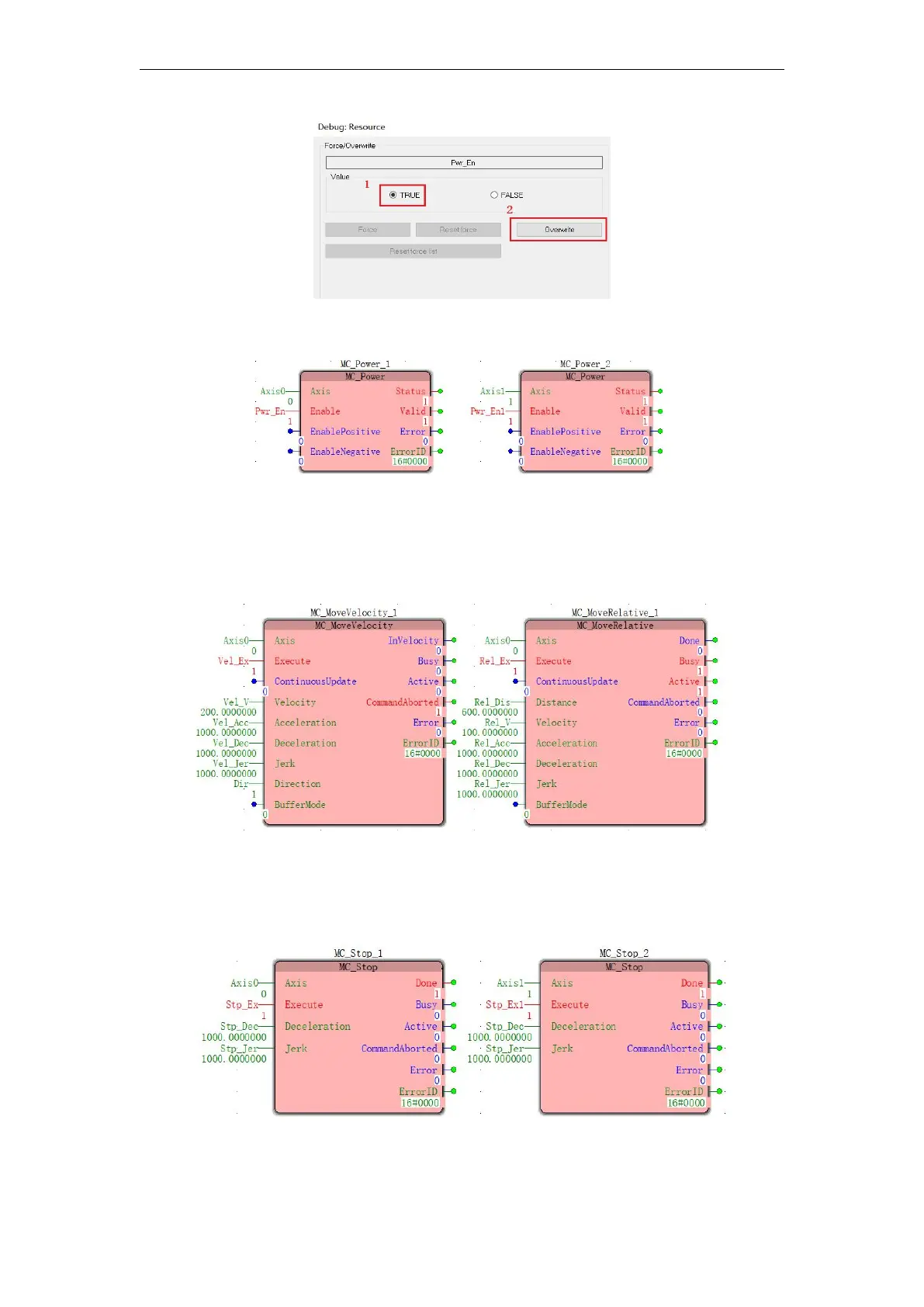
When the
Val id
is changed from
False
to
Ture
, the motion controller axis is successfully
enabled, and the servo is enabled simultaneously by communication , as shown in the figure ;
Commissioning
2
: Similarly, each double-click
Vel of the _ex
,
Rel _ex
, so that the
value
False
becomes
Ture
, the controller will control the
A XIS 0
at the speed of walking speed
mode is set,
the Axis . 1
will be set according to the displacement amount and speed of Take the
relative displacement mode as shown ;
Debug
3
: At this point, double-click
Stp _Ex
to change its value from
False
to
True
, and the
controller will control
Axis 0
anDA
xis 1
to decelerate according to the set deceleration until it
stops , as shown .