VA Motion Controller Programming Manual
315
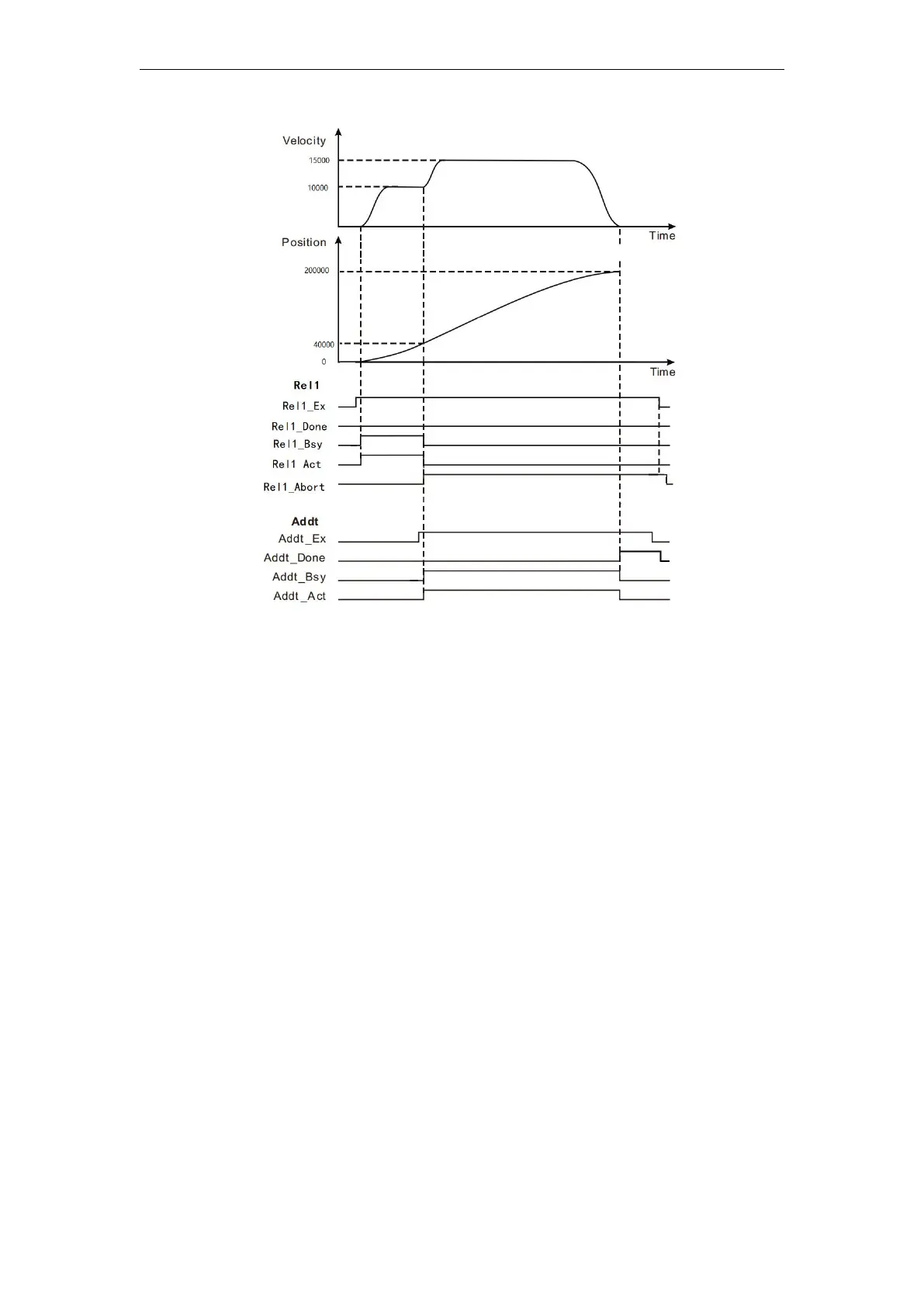
When Rel1_Ex a FALSE to TRUE, the motion controller controls the operation of
the servo motor to the current position as a reference point, the position of the shaft at
Position = 40,000, additional displacement instruction execution, Addt_Ex a FALSE to
TRUE, after one cycle, interrupt bit Rel1_Abt from FALSE becomes TRUE. Meanwhile, the
servo motor movement to position the second additional command parameters. When the
servo motor reaches a set distance (set this time from the sum of the distances to two
instructions), completed by a bit Addt_Done FALSE to TRUE.
When Addt_Ex a TRUE to FALSE, a bit Addt_Done reset cycle is complete.