VA Motion Controller Programming Manual
332
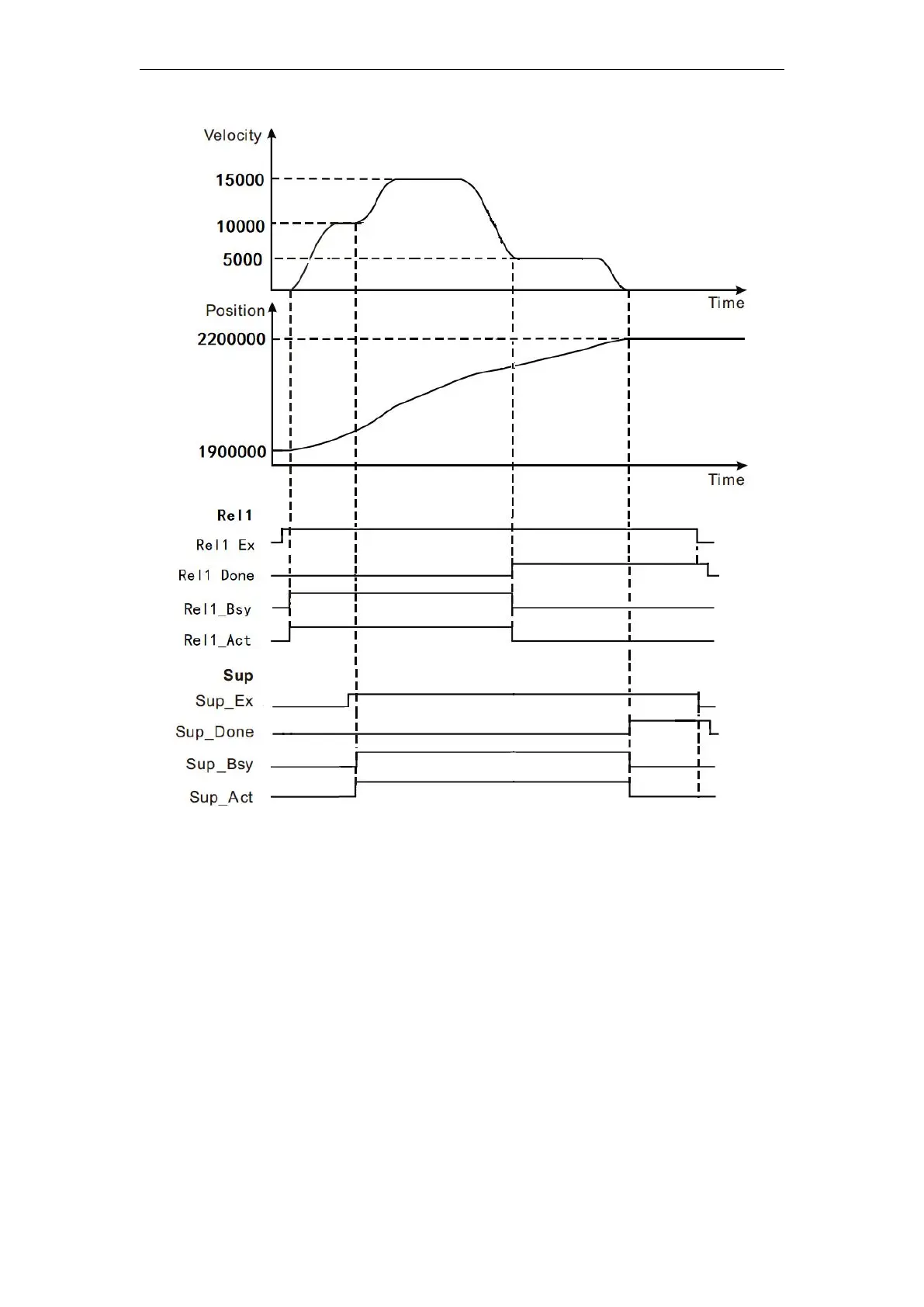
● When Rel_Ex becomes TRUE, after a period Rel_Act, Rel_BsyBecomes TRUE, the motion
controller controls the operation of the servo motor to the current position as a reference point.
● When Sup_Ex becomes TRUE, after a period, Sup_Act, Sup_BsyBecomes TRUE,
MC_MoveSuperimposed instruction starts execution, and an acceleration of the servo motor speed
will (in this case acceleration is 0) is superimposed.
● When a position command is completed MC_MoveRelative, Rel_Done becomes TRUE,
Rel_Bsy and Rel_Act becomes FALSE. The final position of the shaft of the total two command
and processing initial position set position.
● When the additional distance MC_MoveSuperimposed instruction completion, Sup_Done
becomes TRUE, Sup_Bsy and Sup_Act becomes FALSE. The final position of the shaft of the
total two command and processing initial position set position.
● When Rel_Ex becomes FALSE, Rel_Done becomes FALSE. When Sup_Ex becomes FALSE,
Sup_Done
Becomes FALSE.