VA Motion Controller Programming Manual
353
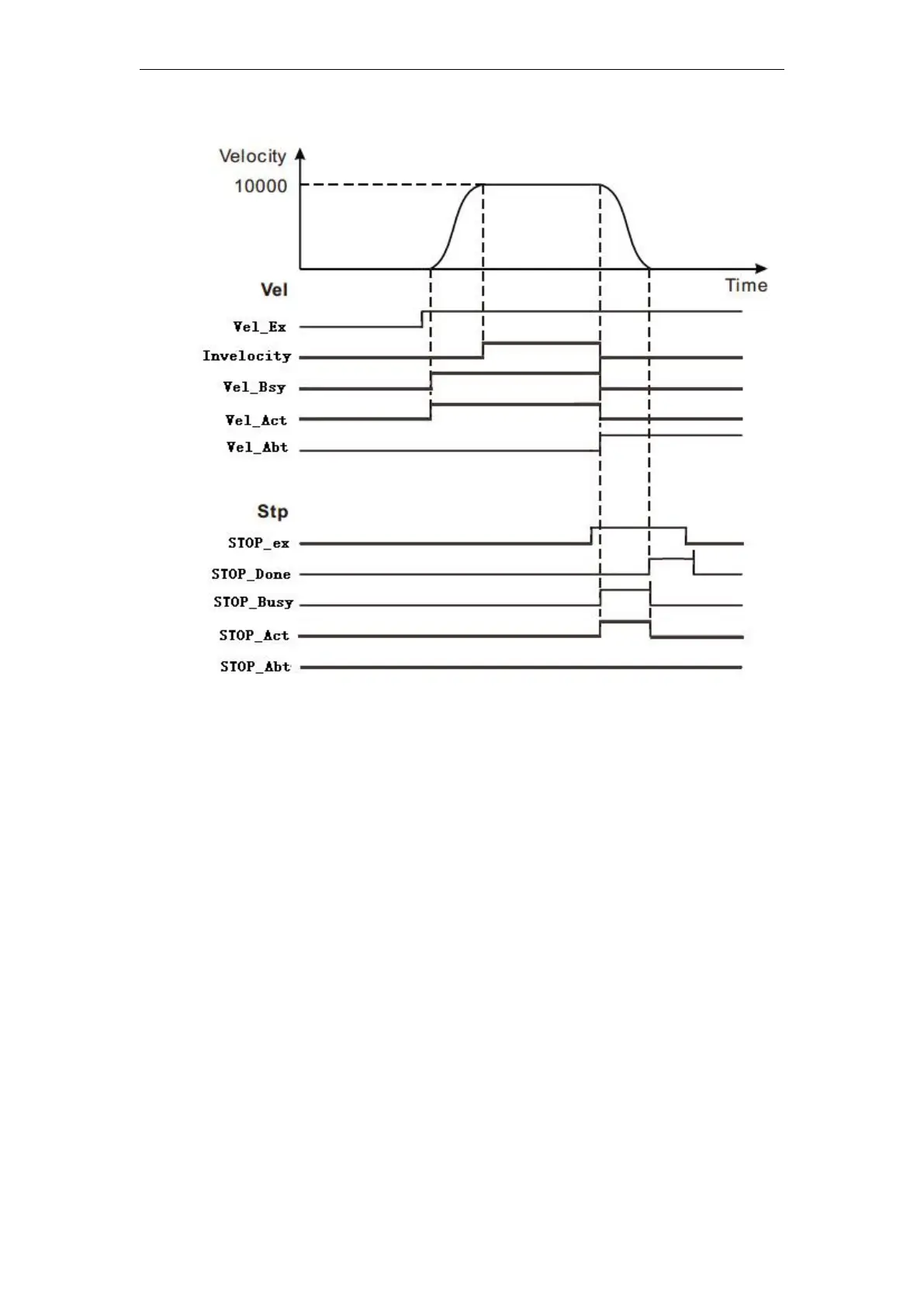
When Vel_Ex becomes TRUE, after a period Vel_Bsy, Vel_Act becomes TRUE,
the servo motor begins to move forward. When the servo motor reaches the target speed,
Invelocity becomes TRUE.
When STOP_ex becomes TRUE, after a period STOP_Busy, STOP_Act becomes
TRUE, while Invelocity becomes FALSE, Vel_Abt becomes TRUE, the servo motor starts to
decelerate.
When the shaft speed is reduced to zero, STOP_Done becomes TRUE, while
STOP_Busy, STOP_Act becomes FALSE.
When STOP_ex becomes FALSE, after a period STOP_Done becomes FALSE.