VA Motion Controller Programming Manual
361
TRUE output instruction is
executed
It represents execution of
the faulting instruction when the
output instruction is TRUE
Error Error code when
execution instruction
Position (actual
position)
The actual position of the
axis
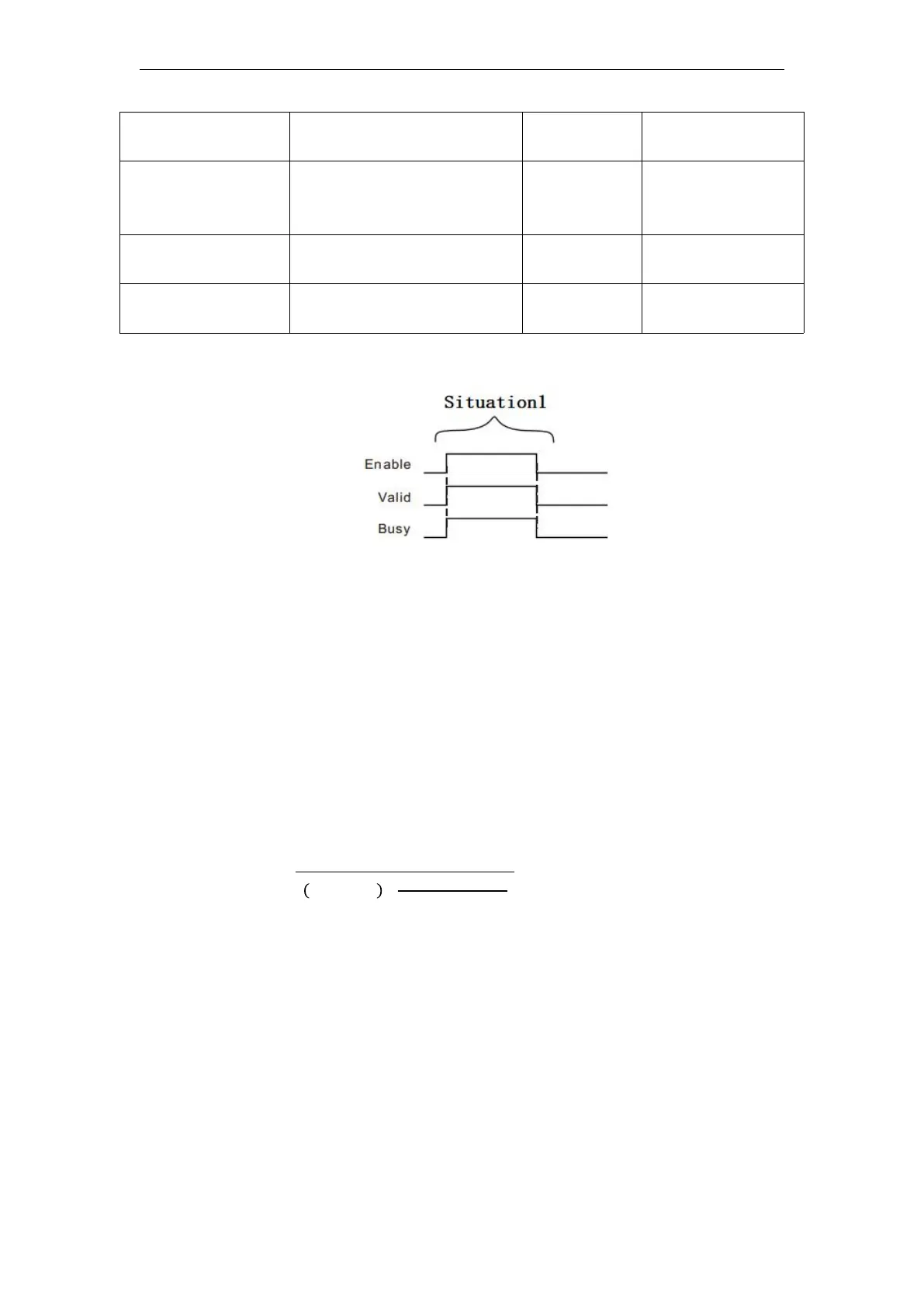
FIG output change timing
Case 1:When Enable the FALSE to TRUE, Valid and Busy simultaneously become
TRUE ,. When Enable becomes FALSE, Valid, Busy all become FALSE.
Function Description
This instruction is used to read the actual position of the shaft (including the real axis and the
imaginary axis encoder shaft)
The actual position
Units of the actual position of this instruction is read as a unit, and the unit of the servo
actuator feedback to the controller the position of a pulse, therefore the actual position obtained by
the feedback pulses position servo drive after conversion, use the axis parameter in the conversion
of Motor_PPC, Reductor_Num, Reductor_Den, means lead / perimeter (Screw_Lead /
Disc_Circumference). Conversion relation shown in the following formula:
Position output performed when a linear axis, the command axis = ActualPosition;
If the axis of the rotary shaft, the output of the instruction execution Position =
ActualPosition% Modulo (modulo result Position ActualPosition press axis parameters do modulo
operation), the value of Position changes between 0 ~ Modulo.
The actual location update timing
Because of this actual position from the position feedback servo drive pulses, the refresh
timing of the actual position provided by MC_AXIS_REF Sample_Time sampling time of
the pulse encoder feedback decisions. In a sampling period, the number of servo position
feedback pulses to the controller action occurs only once. Thus, the real axis command read
Real-time position is less than the actual position capture, real-time location For
obtaining higher, use the position capture function.