Additional Parameters described in this chapter. The
application torque limit must be >0 to enable movement.
Click on the Transfer set-point button to set the mode of
operation of the servo drive to Prole Position Mode and
transfer the set-point.
The Change immediately and Stop between set-points
options are represented by the 2 checkboxes on the left of
the control.
Set the desired motion type (absolute or relative) using the
radio buttons Absolute motion, Relative motion, or Absolute
continuous motion (see Illustration 5.39).
The options and motion type are transmitted to the servo
drive together with the new set-point, when clicking on
the Transfer set-point button.
The Absolute continuous motion type continuously moves
between the 2 target positions that are given in the 2
numeric
elds. Transfer another absolute or relative set-
point to stop this sequence. The Prole Position Mode
control relies on cyclic communication to send any
commands to the servo drive.
Illustration 5.39 Drive Control – Prole Position Mode
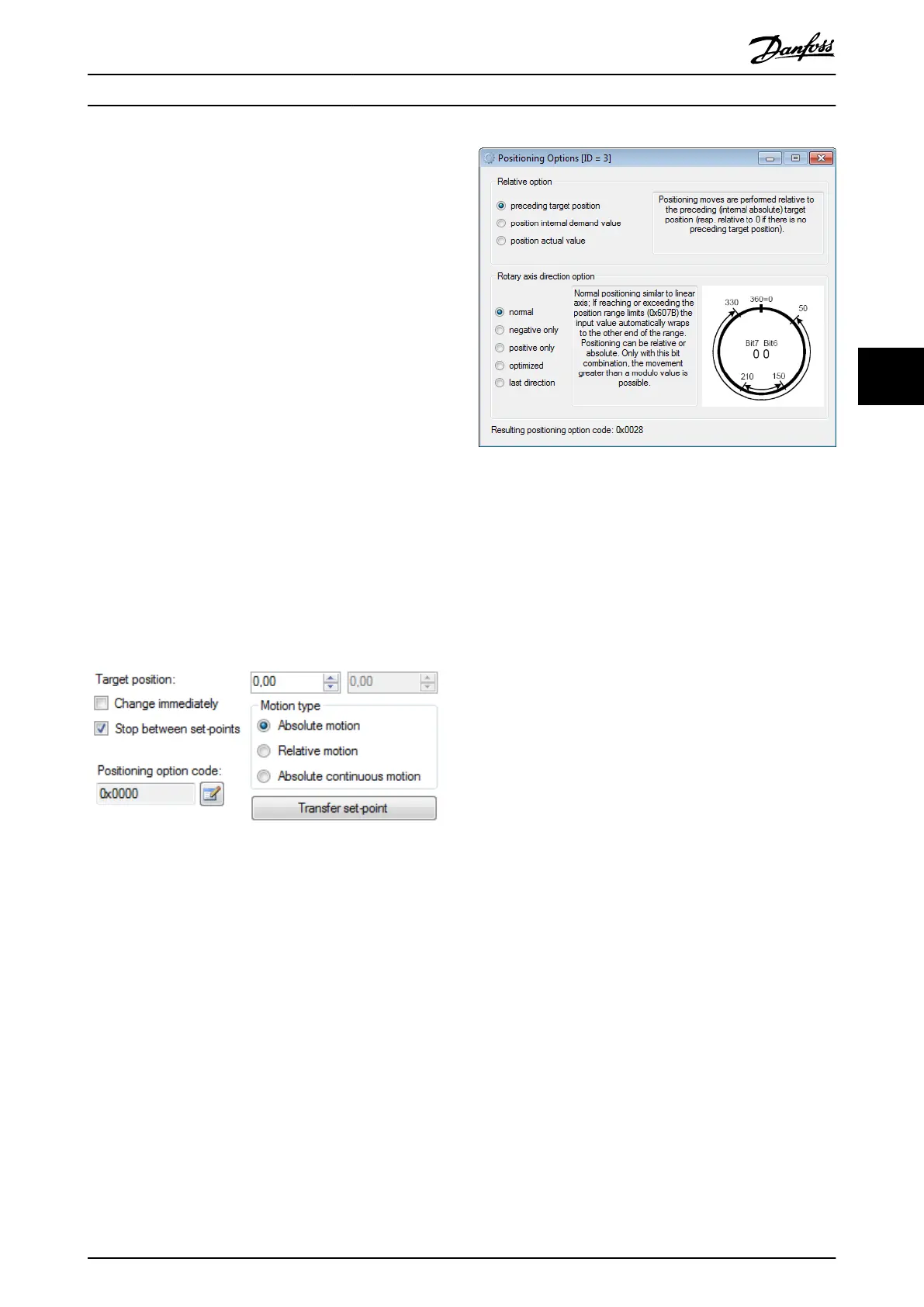
The Positioning option code text box shows the actual value
of the positioning option code on the servo drive as a
hexadecimal number with a leading 0x for clarity (see
chapter 7.10.3 Parameter: Positioning Option Code (0x60F2)).
Click on the Edit button to the right of the text eld to
open the Positioning Options window (see Illustration 5.40).
Illustration 5.40 Positioning Options Window
The Positioning Options window consists of the 2 options
that make up the positioning option code of the servo
drive:
•
Relative option
•
Rotary axis direction option
The possible values for each option are shown as radio
buttons. When a radio button is selected, textual
information on the selected value option is shown on the
right of the option. For Rotary axis direction option the
behavior of the option is also graphically visualized. The
resulting positioning option code value is shown in
hexadecimal format at the bottom of the window. It is
updated every time an option changes. Whenever
changing an option, it is immediately transmitted to the
servo drive. Therefore, the Positioning Options window
relies on cyclic communication with the servo drive.
Mode of operation controls - Prole velocity mode
The Prole Velocity Mode is operated by sending a target
velocity to the servo drive. There are 2 methods:
•
Set the value of the Target velocity numeric eld
and click on the Transfer set-point button.
•
Use the Target velocity slider to set the value.
Set the Additional Parameters to applicable values to allow
motion to take place.
The Target velocity value is shown in the velocity unit set in
the Options window (see chapter 5.5.8 Options Window).
Illustration 5.41 shows the Drive Control sub-tool with an
activated Prole Velocity Mode control.
The minimum and maximum values of both the Target
velocity numeric eld and the Target velocity slider are set
to match the Maximum prole velocity parameter on the
servo drive. The initial slider position is in the middle of
the slider, representing 0.
Operation with ISD Toolbox Programming Guide
MG36D102 Danfoss A/S © 01/2017 All rights reserved. 133
5 5

 Loading...
Loading...







