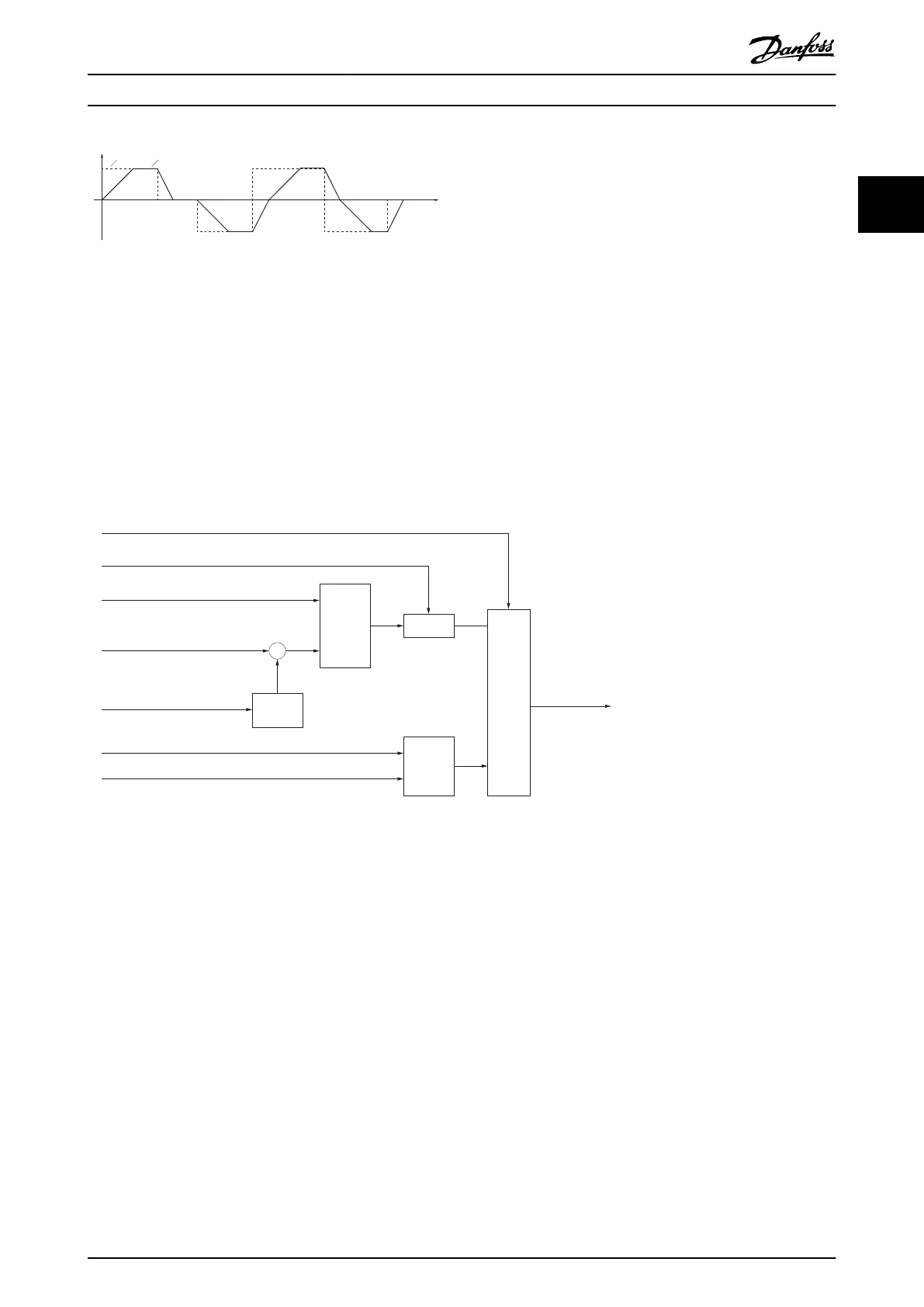
Target velocity
Velocity
acc
0
dec
acc dec acc dec
acc dec
Illustration 2.20 Usage of Acceleration and Deceleration in
Velocity Control
This principle on using the acceleration and deceleration value applies to all velocity controlled modes of operation. The
ramp bends when reversing the velocity. If this behavior is undesired, set the value of the acceleration and deceleration to
the same value.
Velocity reached function
The velocity reached function oers the possibility to dene a velocity range around a velocity demand value to be
regarded as valid. If the velocity of the servo drive is within this area for a specied time (see chapter 7.11.4 Parameter:
Velocity Window (0x606D)), the velocity window time (see chapter 7.11.5 Parameter: Velocity Window Time (0x606E)), the
related control bit Target reached (bit 10) in the Statusword is set to 1.
Target reached option code (0x2054)
Velocity window time (0x606E)
Velocity window (0x606D)
Velocity actual value (0x606C)
Velocity demand value (0x606B)
Target velocity (0x60FF)
Target velocity (0x60FF)
Target reached
Comparator
Window
comparator
Limit
function
Timer
Selector
Illustration 2.21 Velocity Reached - Functional Overview
Illustration 2.22 shows the denitions of the sub-function Velocity reached. A window is dened for the accepted velocity
range symmetrically around the velocity. If a servo drive is running within the accepted velocity range over the time velocity
window time, the bit Target reached (bit 10) in the Statusword is set to 1.
Servo Drive Operation Programming Guide
MG36D102 Danfoss A/S © 01/2017 All rights reserved. 31
2 2

 Loading...
Loading...







