Attribute Mandatory/
optional
(+default value)
Value
range/
allowed
values
Description
endAction Same as in Table 2.26.
Table 2.28 Attributes for TimePoly in Coecient Representation
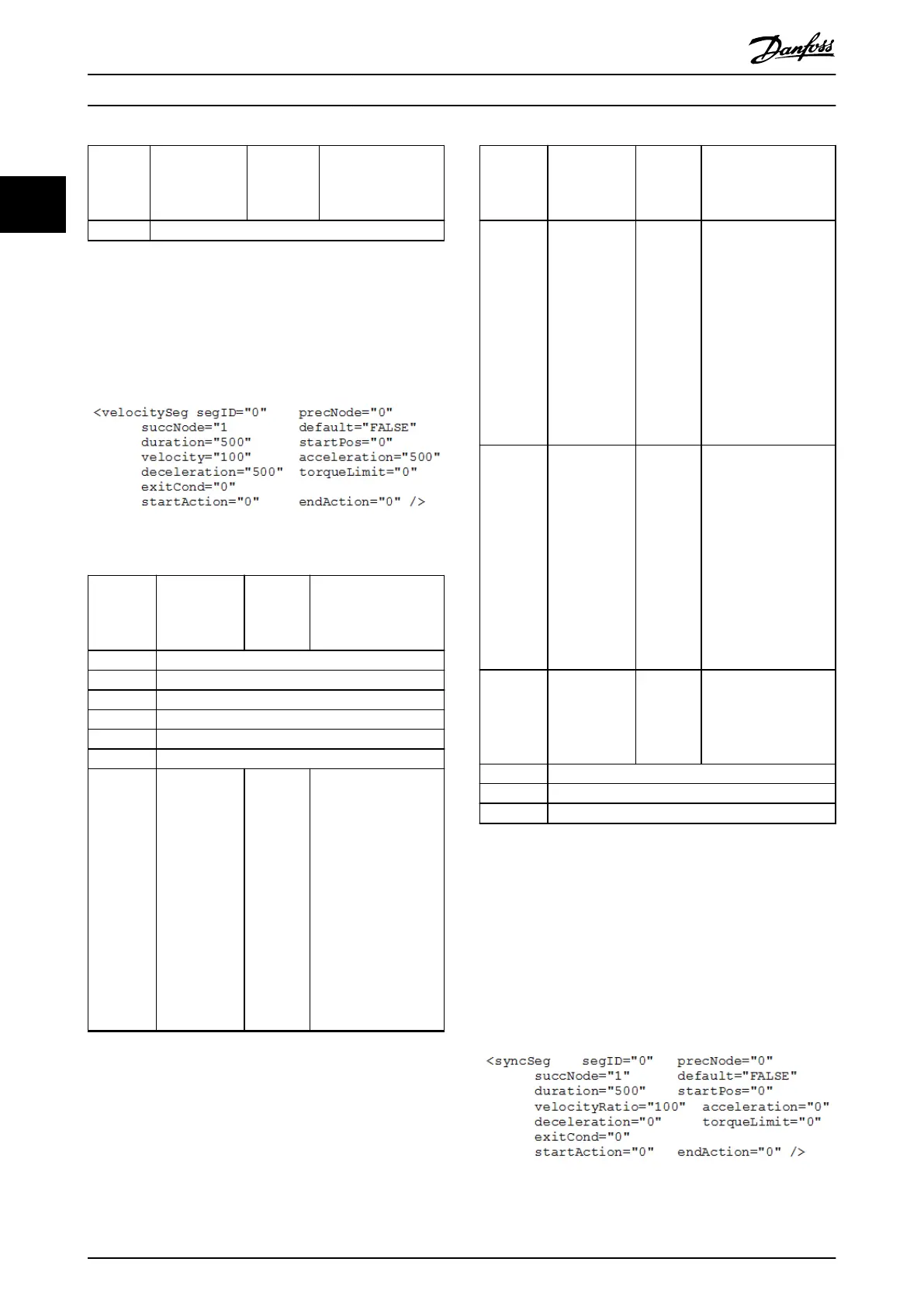
VelocitySegment:
The VelocitySegment is used for a movement with constant
velocity, independent from the velocity of the guide value.
It is similar to a P1 TimePoly of type relative, but velocity
controlled instead of position controlled.
Illustration 2.97 Start/Endpoint Representation
Attribute Mandatory/
optional
(+default
value)
Value
range/
allowed
values
Description
segID Same as in Table 2.26.
precNode Same as in Table 2.26.
succNode Same as in Table 2.26.
default Same as in Table 2.26.
duration Same as in Table 2.26.
startPos Same as in Table 2.18.
velocity M Float Velocity of the axis
during this segment.
The velocity must be
given in rps.
To ensure smooth
movements, the
velocities of all
segments that are
connected in the same
node should be the
same. If this is not
parameterized correctly,
a jump in velocity may
occur.
Attribute Mandatory/
optional
(+default
value)
Value
range/
allowed
values
Description
acceleration M Float >0 Acceleration of the axis
when increasing the
velocity. The
acceleration must be
given in rps per
second.
It is possible to
parameterize jumps in
acceleration when 2
succeeding segments
have dierent startAcc
and endAcc values.
deceleration O; default =
value of
acceleration
Float >0 Deceleration of the axis
when decreasing the
velocity. The
deceleration must be
given in rps per
second.
It is possible to
parameterize jumps in
acceleration when 2
succeeding segments
have dierent startAcc
and endAcc values.
torqueLimit O; default =
maximum
Positive
integer (0;
32767)
Congures the
maximum torque used
during this segment.
The value is given per
mNm.
exitCond Same as in Table 2.26.
startAction Same as in Table 2.26.
endAction Same as in Table 2.26.
Table 2.29 Attributes for VelocitySegment in Start/Endpoint
Representation
Coecient representation: This representation is not
available.
SyncSegment:
The SyncSegment is used for a synchronized, velocity
controlled movement in relation to the velocity of the
guide value. It is similar to a VelocitySegment, but with a
coupling factor for the velocity (velocityRatio).
Illustration 2.98 Start/Endpoint Representation
Servo Drive Operation
VLT
®
Integrated Servo Drive ISD
®
510 System
64 Danfoss A/S © 01/2017 All rights reserved. MG36D102
22

 Loading...
Loading...







