Attribute Mandatory/
optional
(+default
value)
Value
range/
allowed
values
Description
segID Same as in Table 2.26.
precNode Same as in Table 2.26.
succNode Same as in Table 2.26.
default Same as in Table 2.26.
duration Same as in Table 2.26.
startPos Same as in Table 2.18.
velocity
Ratio
M Float Velocity of the axis
during this segment.
The velocity must be
given as a factor
between the velocity of
the axis in relation to
the velocity of the
guide value (1
revolution of the axis
per 1 round of guide
value). To ensure
smooth movements, the
velocities of all
segments that are
connected in the same
node should be the
same. If this is not
parameterized correctly,
a jump in velocity may
occur.
acceleration M Float Acceleration of the axis
when increasing the
velocity. The
acceleration must be
given in rps per second.
It is possible to parame-
terize jumps in
acceleration when 2
succeeding segments
have dierent startAcc
and endAcc values.
deceleration O; default =
value of
acceleration
Float Deceleration of the axis
when decreasing the
velocity. The
deceleration must be
given in rps per second.
It is possible to parame-
terize jumps in
acceleration when 2
succeeding segments
have dierent startAcc
and endAcc values.
torqueLimit Same as in Table 2.29.
exitCond Same as in Table 2.26.
startAction Same as in Table 2.26.
Attribute Mandatory/
optional
(+default
value)
Value
range/
allowed
values
Description
endAction Same as in Table 2.26.
Table 2.30 Attributes for SyncSegment in Start/Endpoint
Representation
Coecient representation: This representation is not
available.
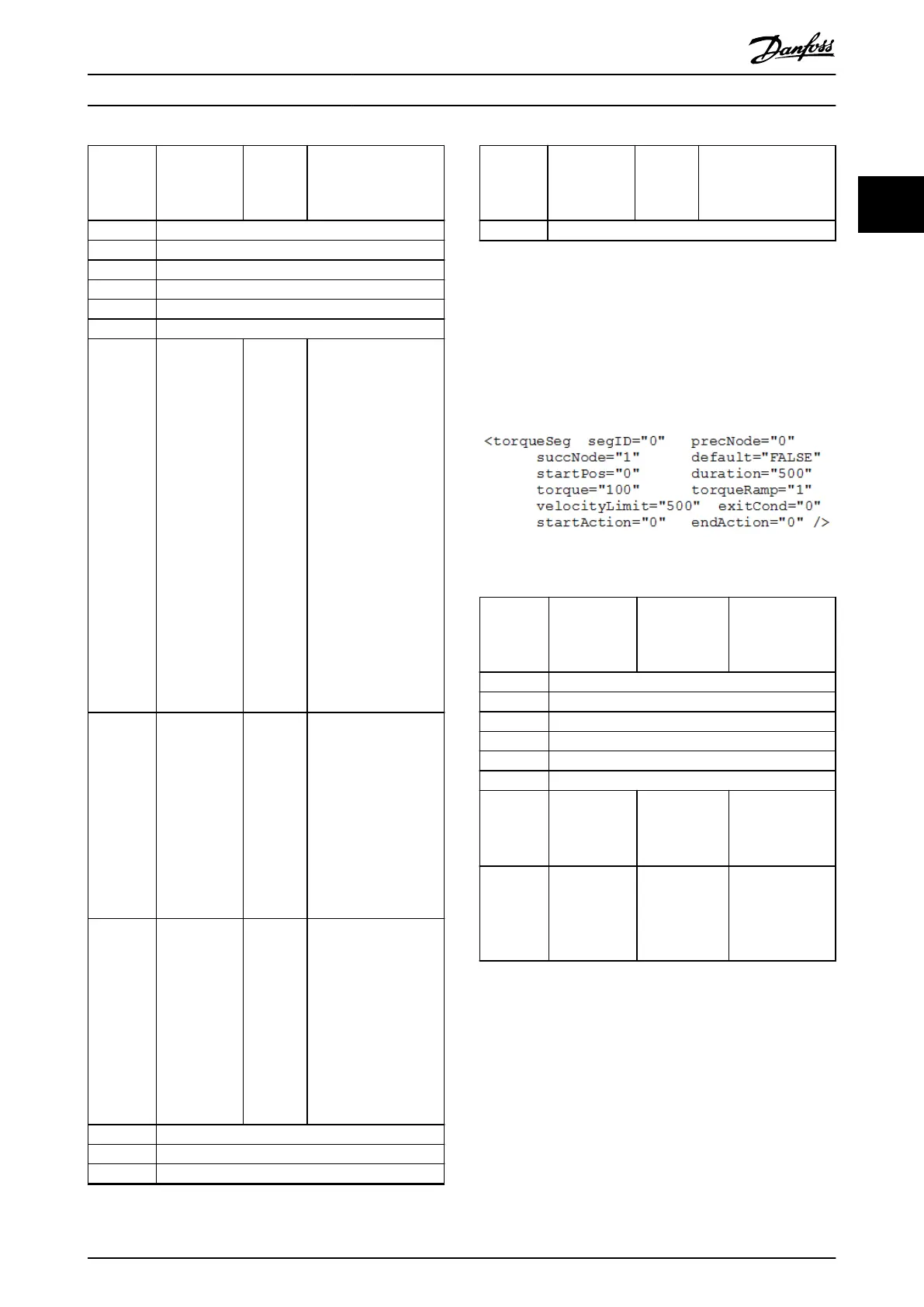
TorqueSegment:
The TorqueSegment is used for a torque controlled
movement, independent of the guide value.
Illustration 2.99 Start/Endpoint Representation
Attribute Mandatory/
optional
(+default
value)
Value range/
allowed values
Description
segID Same as in Table 2.26.
precNode Same as in Table 2.26.
succNode Same as in Table 2.26.
default Same as in Table 2.26.
duration Same as in Table 2.26.
startPos Same as in Table 2.18.
torque M Integer (–
32768; 32767)
Congures the
target torque. The
value is given in
mNm.
torqueRamp O; default =
maximum
Integer (1;
2147483648)
Congures the
rate of change of
torque. The value
is given in mNm
per second.
Servo Drive Operation Programming Guide
MG36D102 Danfoss A/S © 01/2017 All rights reserved. 65
2 2

 Loading...
Loading...







