5-7
5-2 Common Function Setting
COMMON PARAMETER SETTING
- SV Series User’s Manual -
Encoder Pulse Output Setting
Encoder pulse output is the function used by a servo motor to output a set pulse every revolution from the "Encoder
pulse A-phase (A+/A
-
)", "Encoder pulse B-phase (B+/B
-
)" and "Encoder pulse Z-phase (Z+/Z
-
)" terminals.
For specification and wiring of each terminal, see "4-5 Wiring I/O Signals", Page 4-24.
■ Signal
Encoder pulse output can output pulses of different status through the following output terminals. Output pulses are shown below.
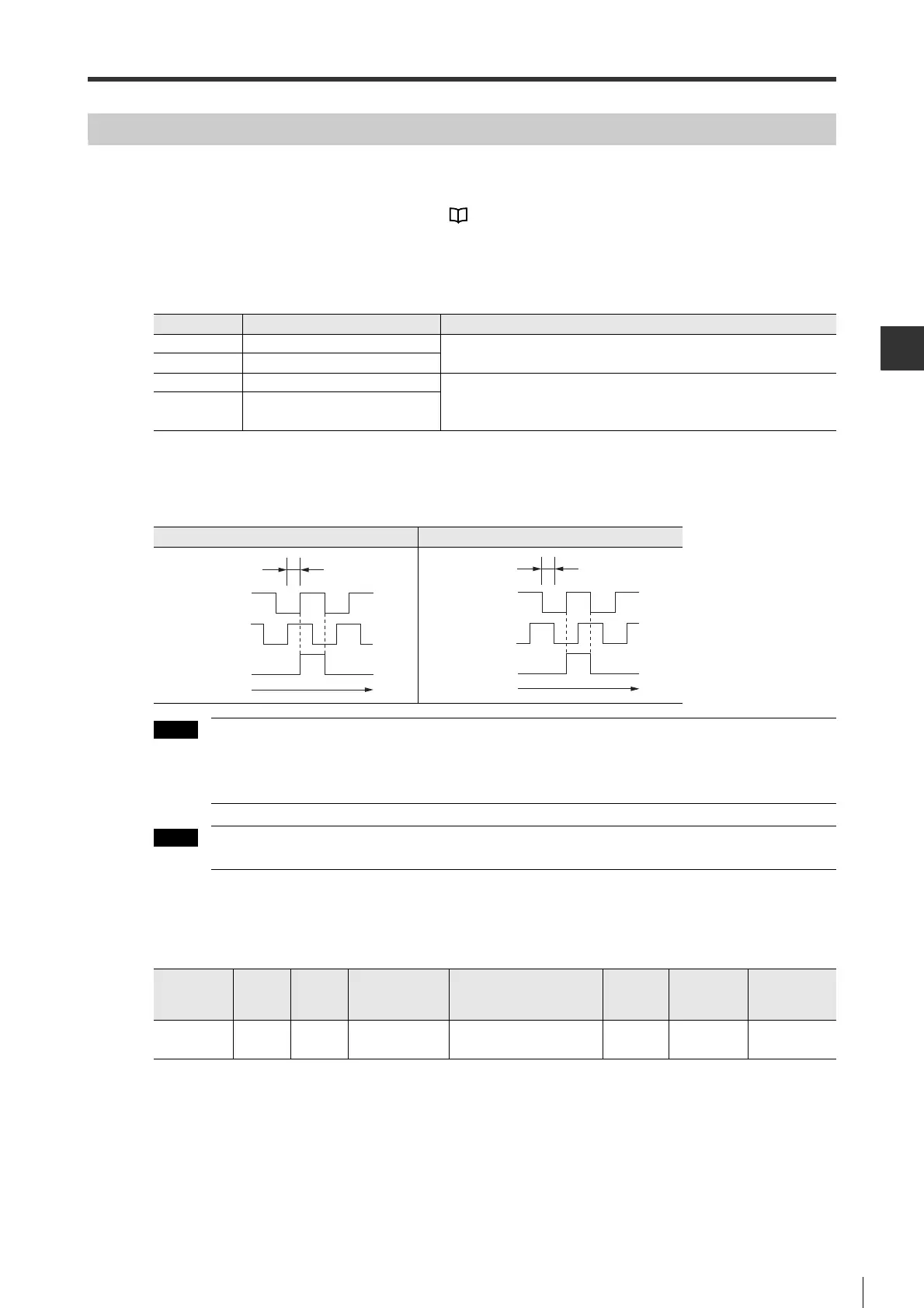
■ Output pulse phase
A pulse with B phase leading 90
°
will be output in CCW direction; a pulse with A-phase leading 90
°
will be ouput in CW.
After power is ON or the servo amplifier (and the MECHATROLINK-II configuration) is restarted, if the
motor fails to rotate more than two revolutions, then Z-phase might not be output correctly. If the motor
fails to rotate more than two rotations, please perform operation at a speed of below 600min
-1
.
Like the pulse width of A-phase, the pulse width of Z-phase will vary with the "Encoder output pulse" (SYS_03).
■ Output pulse setting
To set up encoder output pulses per motor revolution.
Signal Category Description
A+/A
-
Encoder pulse A-phase The output pulses per motor rotation based on encoder indexing
pulses.
B+/B
-
Encoder pulse B-phase
Z+/Z
-
Encoder pulse Z-phase
The pulse output by the motor every rotation.
ZOC
Open collector of encoder pulse
Z-phase
CCW (B-phase leading 90°) CW (A-phase leading 90°)
Z-phase
B-phase
-phase
90°
Z-phase
B-phase
-phase
90°
Parameter
type
Category
Level
Parameter
name
Setting range
Setting
unit
Default
(factory
setting)
Enable
timing
SYS_03 System Basic
* Encoder output
pulse
16 to 262144 PLS/Rev 2048
After power is
ON again
 Loading...
Loading...