A-44
APPENDIX
A-5MECHATROLINK-II Communication Commands
- SV Series User’s Manual -
● For emergency stop (main circuit OFF)
When SV_ON or PON=0 is detected by the STATUS field of response data, the SV_OFF command is executed.
Among others, the SMON command is used to monitor status of servo amplifier on a continuous basis in emergency
stop.
● For alarm
When ALM=1 is detected in STATUS filed of response data, the SV_OFF command is executed. The alarming status
can be confirmed by ALM_RD command.
Alarm status can be cancelled by removing the alarm cause or sending ALM_CLR command.However, the alarm can
not be cancelled when an alarm for restarting the power supply occurs.
In case a communication alarm occurs (E5*, E6*), be sure to execute SYNC_SET command after cancelling the alarm
with the ALM_CLR command.
Origin position setting when operation starts
■INC encoder
When INC servo motor is used, it is necessary to perform origin return when power is ON again.
Set up a coordinate after the origin is confirmed.
There are two ways of setting command coordinate.
● Set command coordinate via ZRET command
The ZRET command is used by the master station (control equipment) to perform origin return for slave station (servo
amplifier).
● Set command coordinate via POS_SET command
Command coordinate for slave station is set up by control equipment via POS_SET command.
1丗Positioning to reference position.
2丗POS_SET_MODE.POS_SEL=3, POS_SET_MODE.REFE=1, POS_DATA=(reference position),
To execute POS_SET command.
ZPOINT and software limit will be enabled after coordinate is set.
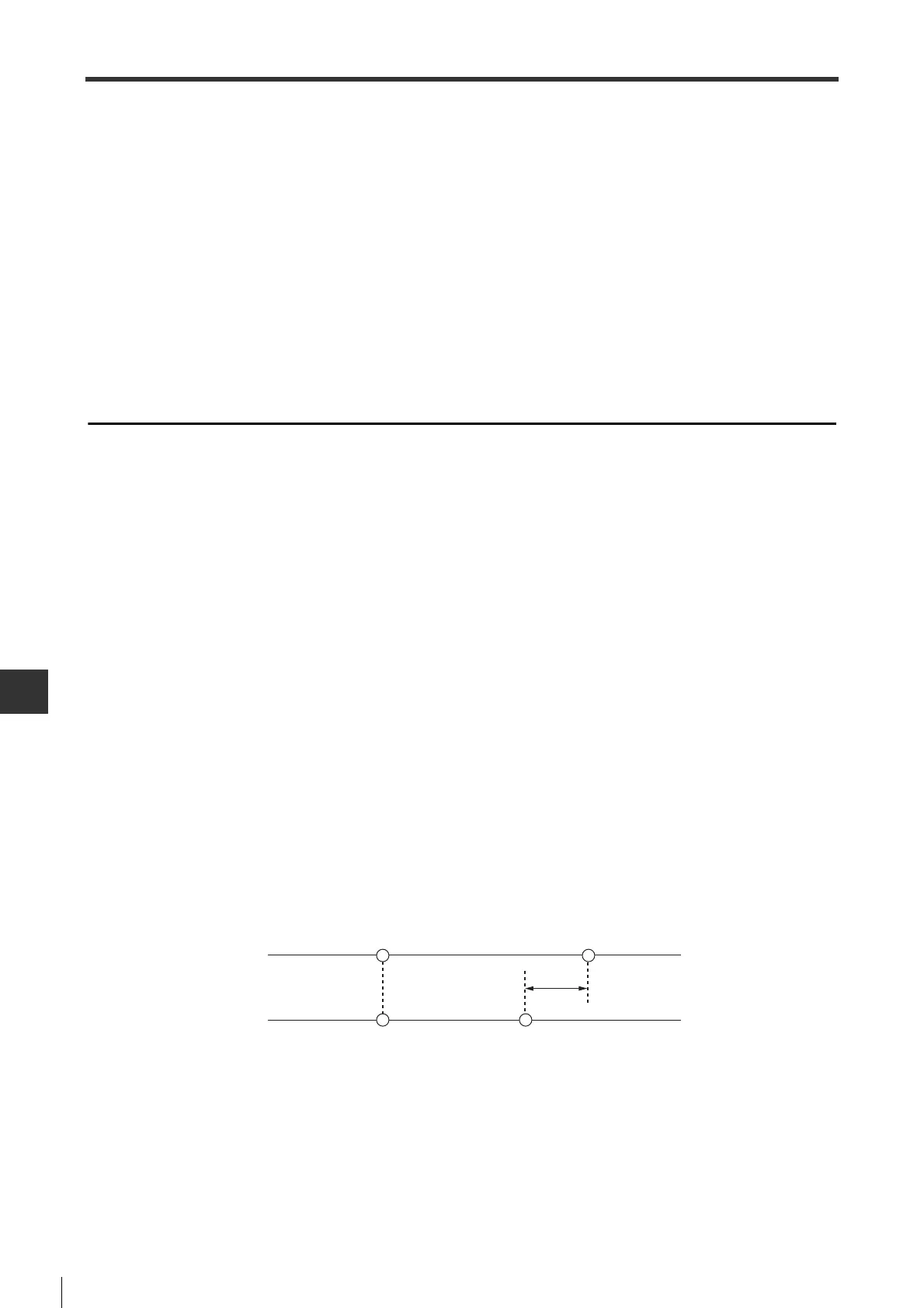
■ABS encoder
When ABS servo motor is used, absolute position data is read from ABS encoder via SENS_ON command to set up
the command coordinate of servo amplifier. At the same time, command coordinate depends on the detecting position
for ABS encoder and "Absolute encoder origin offset" (ML_06).
Current position (command coordinate) = current position (encoder coordinate) +ML_06
Motor starts
Current position
ML_06
Encoder coordinate
Origin for encoder
Command origin coordinate
 Loading...
Loading...