A-70
APPENDIX
A-5MECHATROLINK-II Communication Commands
- SV Series User’s Manual -
■Relevant parameters
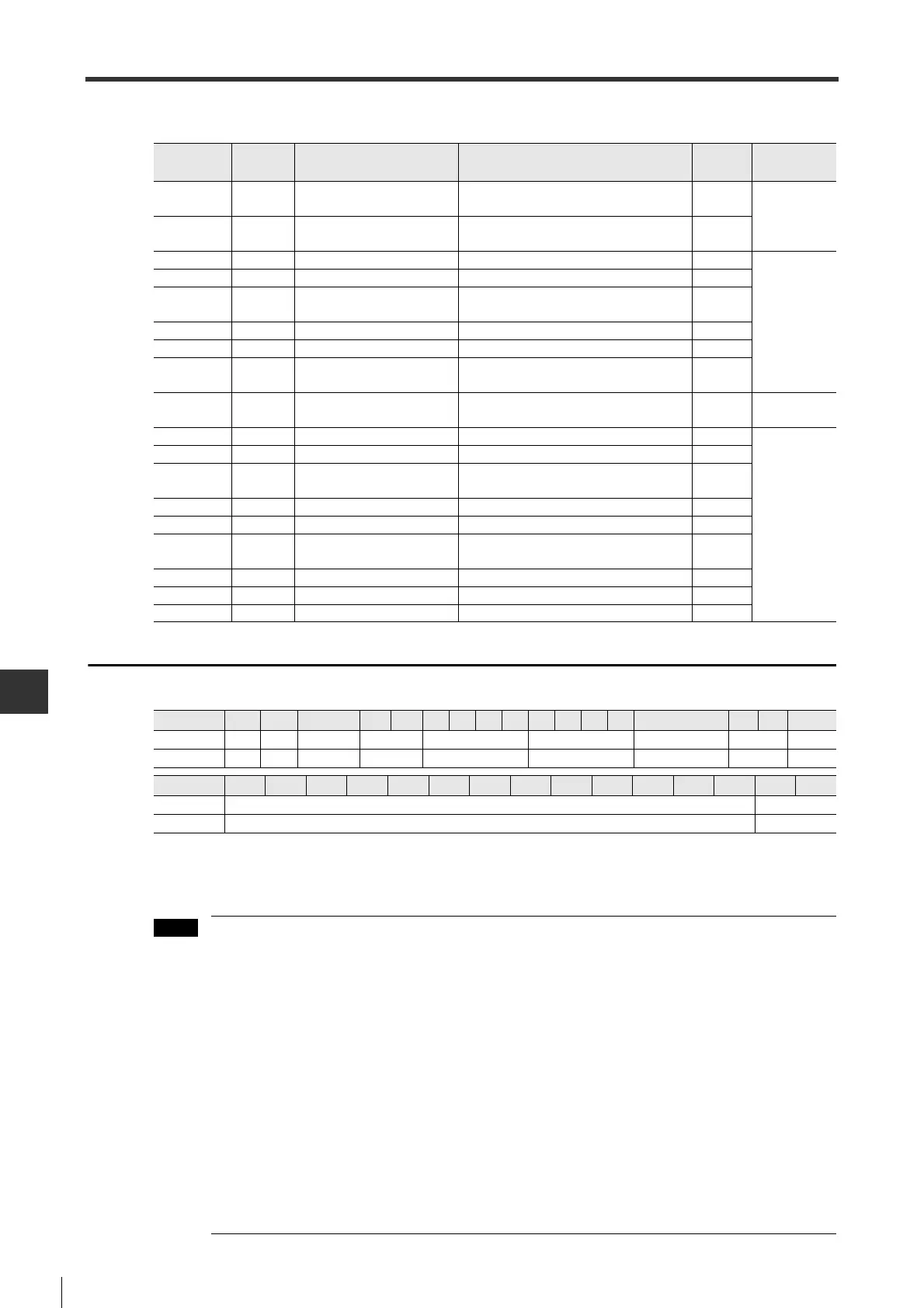
Origin return (3AH)[ZRET]
To execute origin return.
Available phase : Phase 2 and Phase 3
Type of command : non-sync type
Reading cycle : < Communication period
Sub command : Available
When the following commands are received in executing the ZRET command, the origin return will be
interrupted:
(DISCONNECT/SYNC_SET/CONFIG/HOLD/SV_OFF/INTERPOLATE/POSING/FEED/LATCH/
EX_POSING/VELCTRL/TRQCTRL).
If a latching information is input in the execution, then the latching signal input position plus the position
movement upon inputting the latching signal (ML_20) is positioned.When a latch signal is input, the position
will be saved to the feedback latch position (LPOS); besides, the LPOS within a communication cycle will be
forcibly returned to MONITOR2.When a latch signal is input, the L_CMP is equal to 1, while after the origin
return action is finished, the L_CMP is equal to 0.Therefore, whether the L_CMP is equal to 1 cannot be
confirmed when this is quite close to the origin.
The target speed (TSPD) can be changed before DEC is input.
Whether the output of position command is finished or not can be confirmed by the DEN of STATUS, as
well as the ZPOINT (origin position).
If the following warning appears, command will be ignored.
• when the LATCH command is received as a result of closing the servo ("command alarm 1 (command
condition is not met)" (95A)).
• ("data setting alarm 2 (beyond the range)" (94B))when the target speed exceeds the threshold.
• When the motor operation parameters are written to the KV-ML/MC setting tool (KV MOTION+), SV
series setting software or visiting window ("data setting alarm 1 (beyond data range)" (95A)).
Parameter
Category
Name Set value/setting unit Default
Enable
timing
TUN_34 Special *Torque feedforward
1: Disable
2: Enable
1
When power
is ON again
ML_69 Special *Pos ctrl cmd TFF/TLIM
0: Disable
1: Enable
1
ML_07 Special 1st acceleration rate 1 1 to 65535 (10000CMD_PLS/s
2
) 100
After
changing
ML_08 Special 2nd acceleration rate 1 1 to 65535 (10000CMD_PLS/s
2
) 100
ML_09 Special
Acceleration rate change
speed 1
0 to 65535 (100CMD_PLS/s) 0
ML_10 Special 1st deceleration rate 1 1 to 65535 (10000CMD_PLS/s
2
) 100
ML_11 Special 2nd deceleration rate 1 1 to 65535 (10000CMD_PLS/s
2
) 100
ML_12 Special
Deceleration rate switch
speed 1
0 to 65535 (100CMD_PLS/s) 0
ML_24 Special *Accel/decel constant
0: 1 is valid
1: 2 is valid
0
When power
is ON again
ML_25 Special 1st acceleration rate 2 1 to 20971520 (10000CMD_PLS/s
2
) 100
After
changing
ML_26 Special 2nd acceleration rate 2 1 to 20971520 (10000CMD_PLS/s
2
) 100
ML_27 Special
Acceleration rate change
speed 2
0 to 2097152000 (100CMD_PLS/s) 0
ML_28 Special 1st deceleration rate 2 1 to 20971520 (10000CMD_PLS/s
2
) 100
ML_29 Special 2nd deceleration rate 2 1 to 20971520 (10000CMD_PLS/s
2
) 100
ML_30 Special
Deceleration rate switch
speed 2
0 to 2097152000 (100CMD_PLS/s) 0
ML_16 Special Distance after latch
-
2
30
+1 ~ 2
30
-
1 (CMD_PLS) 100
ML_21 Special P-Latching allowable area
-
2
31
~ 2
31
-
1 (CMD_PLS) 0
ML_22 Special N-Latching allowable area
-
2
31
~ 2
31
-
1 (CMD_PLS) 0
Byte 0 1 2 3 4 5 6 7 8 9
10 11 12 13 14 15 16
Command 03H 3AH
LT_SGNL OPTION
- TSPD
SEL_MON1/2
TLIM WDT
Response 01H 3AH ALARM
STATUS
MONITOR1 MONITOR2
SEL_MON1/2 IO_MON
RWDT
Byte
17 18 19 20 21 22 23 24 25 26 27 28 29 30 31
Command Sub command field Can't use
Response Sub command field Can't use
 Loading...
Loading...