A-62
APPENDIX
A-5MECHATROLINK-II Communication Commands
- SV Series User’s Manual -
Operation-related Commands
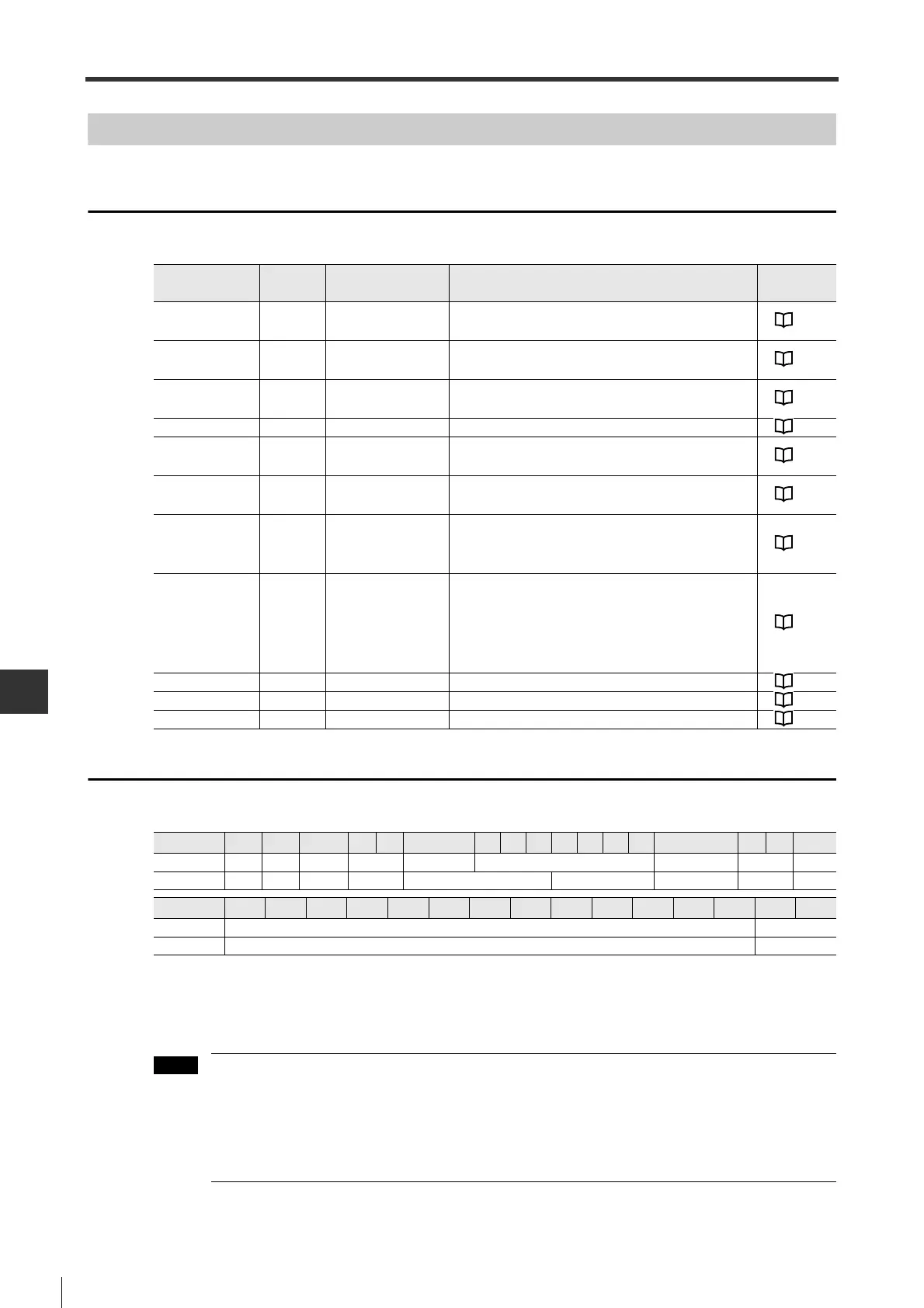
List of operation commands
The MECHATROLINK-II communication commands used during operation are listed as follows.
Motion stop (25H)[HOLD]
To stop servo amplifier with the stop mode specified by HOLD_MOD.
Available phase : Phase 2 and Phase 3
Type of command : non-sync type
Reading cycle : < Communication period
Sub command : Can't use
The LATCH/EX_POSING-based latching operation is canceled upon receiving HOLD command.
Both ZRET latching and origin aligning are canceled upon receiving HOLD command.
After mapping HOLD command, the command position will be read and the coordinates of high-level
equipment will be set up.
Whether the output of position command is finished or not can be confirmed by the DEN of STATUS.
Command
Command
code
Function name Name See page
HOLD 25H Motion stop
Motion is stopped with the deceleration set up and
positioning is performed.
A-62
LTMOD_ON 28H Latch mode request
Enable latching of position data caused by external input
signal.
A-63
LTMOD_OFF 29H Latch mode release
Disable latching of position data caused by external input
signal.
A-64
INTERPOLATE 34H Interpolation transfer To execute the interpolation transfer. A-65
POSING 35H Positioning
The target position (TPOS) is positioned according to
the target speed (TSPD).
A-65
FEED 36H
Transfer with fixed
speed
Transferred with fixed target speed (TSPD). A-67
LATCH 38H
Interpolation transfer
with
position detection
Interpolation transfer. Position is latched with the
latching signal specified.
A-68
EX_POSING 39H
External input
positioning
The target position (TPOS) is positioned according to
the target speed (TSPD).When a latching signal is
input, positioning is made from the latching signal input
position to the position parameterized plus the tavel
caused by the latching signal input.
A-69
ZRET 3AH Origin return To execute origin return operation. A-70
VELCTRL 3CH Speed control To execute speed control. A-72
TRQCTRL 3DH Torque control To execute torque control. A-73
Byte 0 1 2 3 4 5 6 7 8 9
10 11 12
13 14 15 16
Command 03H 25H -
OPTION HOLD_MOD
-
SEL_MON1/2
-
WDT
Response 01H 25H
ALARM STATUS
MONITOR1 MONITOR2
SEL_MON1/2 IO_MON
RWDT
Byte 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31
Command Sub command field Can't use
Response Sub command field Can't use
 Loading...
Loading...