A-58
APPENDIX
A-5MECHATROLINK-II Communication Commands
- SV Series User’s Manual -
Sensor (24H)[SENS_OFF]
Power OFF the encoder.
Available phase : all phases
Type of command : non-sync type
Reading cycle : < 2s
Sub command : Can't use
When ABS encoder is used, position data is uncertain.
Reference point, origin position (ZPOINT) and software limit are disabled.
If the following warning appears, command will be ignored.
• Servo ON ("command warning 1 (command condition is not met)" (95A))
Servo ON (31H) [SV_ON] (31H)[SV_ON]
To excite (operate) servo motor.
Available phase : Phase 2 and Phase 3
Type of command : non-sync type
Reading cycle : > 0.05s, < 10s
Sub command : Available
If the following warning appears, command will be ignored.
• Alarming ("command warning 1 (commanding condition is not met)" (95A))
• Main circuit power OFF ("command warning 1 (command condition is not met)" (95A))
• When ABS encoder is used and SENS_ON is not ended.
After executing SV_O command, the command position will be read and the coordinates of higher-level
equipment will be set up.
Servo OFF (32H) [SV_OFF] (32H)[SV_OFF]
De-excite servo motor.
Available phase : Phase 2 and Phase 3
Type of command : non-sync type
Reading cycle : Value set up by "Brake cmd - SVOFF delay time" (OTH_01). Max. 500ms
Sub command : Available
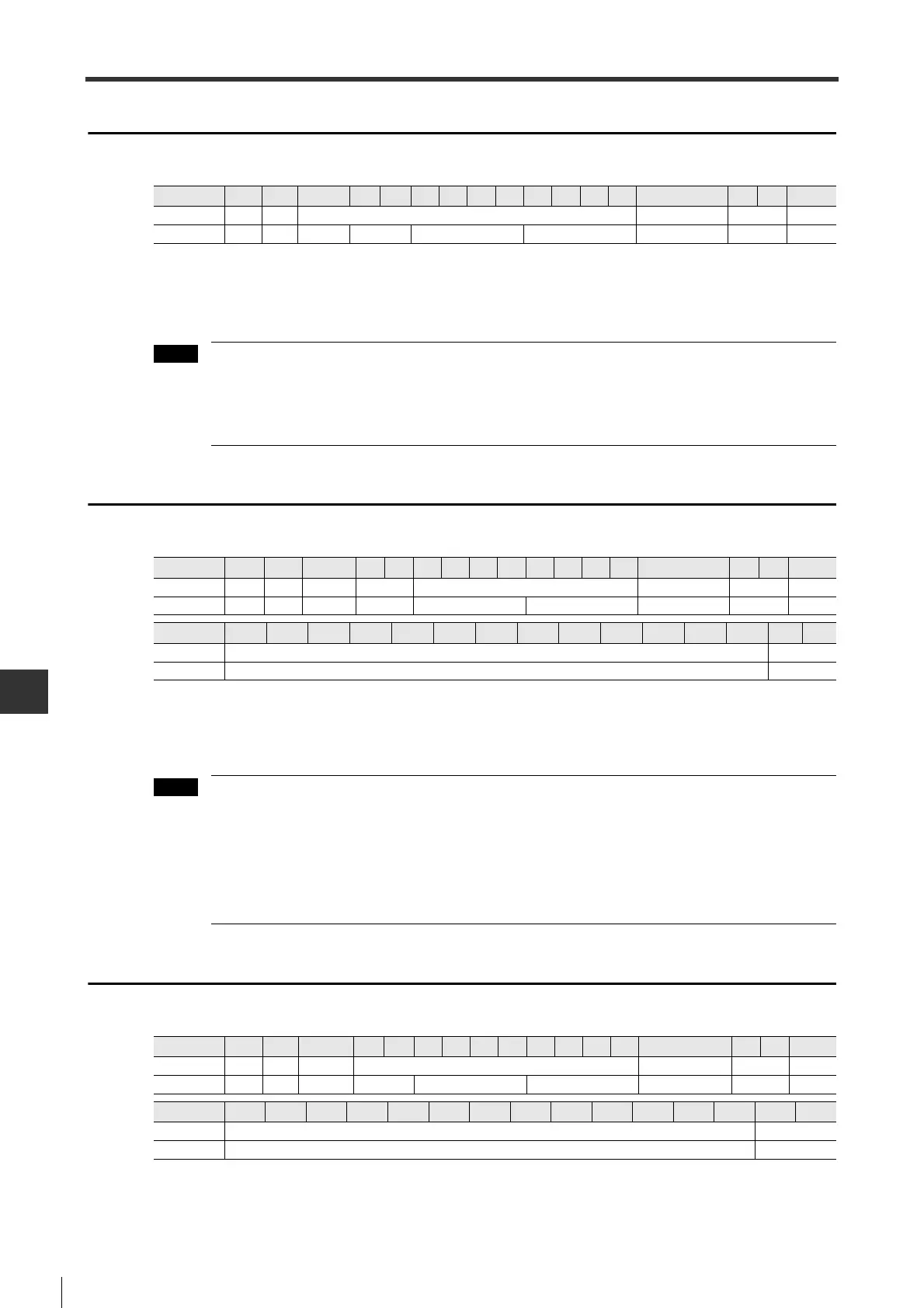
Byte 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
Command 03H 24H -
SEL_MON1/2
-WDT
Response 01H 24H
ALARM STATUS MONITOR1 MONITOR2
SEL_MON1/2
IO_MON RWDT
Byte 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
Command 03H 31H -
OPTION
-
SEL_MON1/2
-WDT
Response 01H 31H
ALARM STATUS
MONITOR1 MONITOR2
SEL_MON1/2 IO_MON
RWDT
Byte 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31
Command Sub command field Can't use
Response Sub command field Can't use
Byte 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
Command 03H 32H - -
SEL_MON1/2
-WDT
Response 01H 32H
ALARM STATUS MONITOR1 MONITOR2 SEL_MON1/2 IO_MON
RWDT
Byte 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31
Command Sub command field Can't use
Response Sub command field Can't use
 Loading...
Loading...