A-2
- SV Series User’s Manual -
APPENDIX
A-1 List of Parameters
You have the option to select parameter display level in SV series. The following display levels are available:
• Basic only
• Basic + Extend
• All (Basic + Extend + Special)
"Basic + Extend" is the ex-factory setting, which normally doesn't need to be changed.
If change is required, you can do this from the Access Window, KV-ML/MC setting tool (KV MOTION+) or SV series
setting software.
For details, see Chapter 11 "Access Window", KV-ML/MC Setting Tool User's Manual, Chapter 3 "View",
SV series Setting Software User's Manual, Chapter 3 "View".
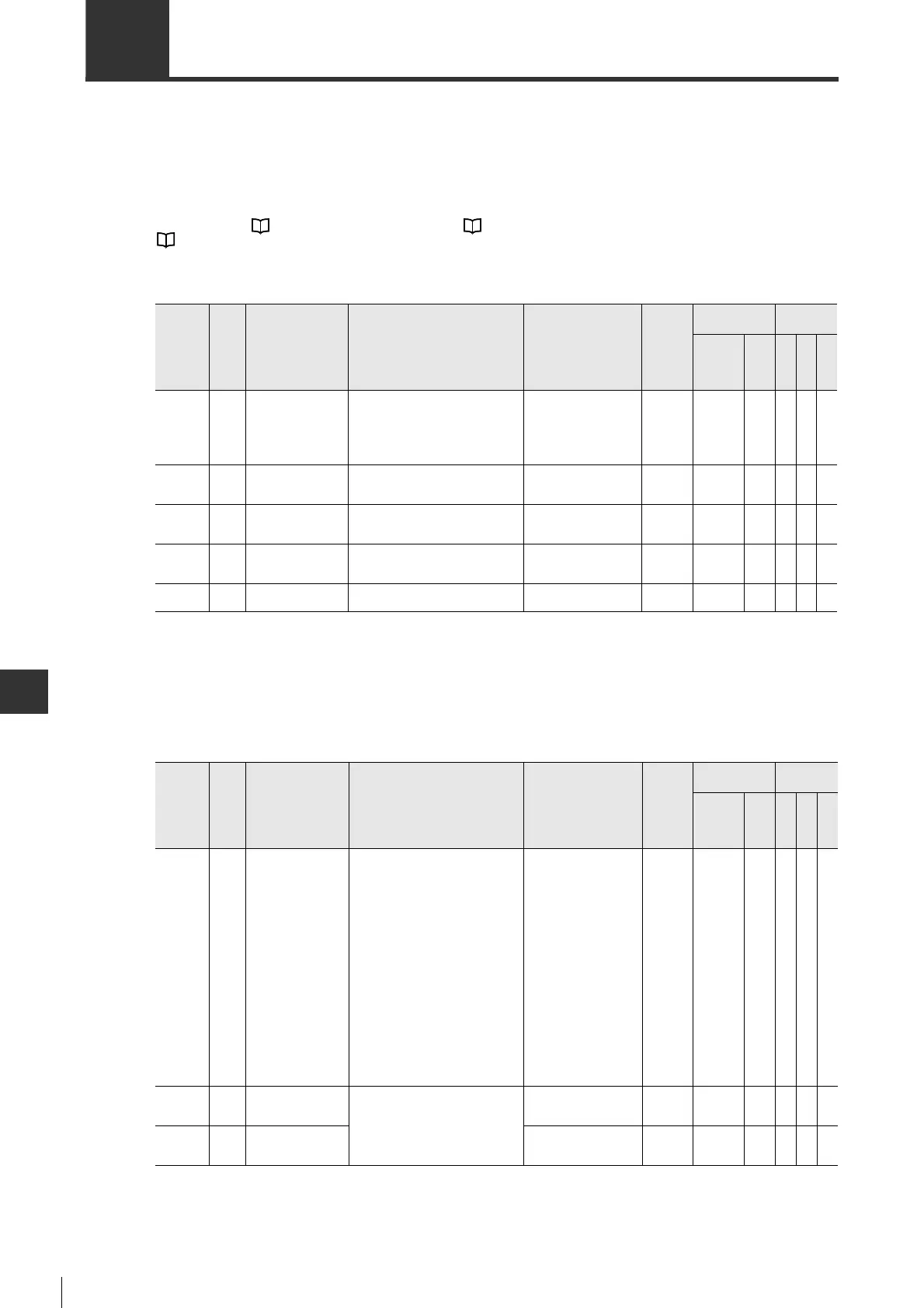
■System related parameters
■Position-related parameters
Parameter
Category
Parameter
name
*1
*1 For parameters marked with "*", the power needs to be restarted after setting.
Name
Set value/setting
unit
Default
Enable type
*2
*2 ML-II is the short name for MECHATROLINK-II type and PLS the pulse/analog input type.
For MECHATROLINK-II, the number in the bracket is parameter number.
Control
mode
ML-II
PLS
Position
Speed
Torque
SYS_01 Basic *Control mode
To set up the control mode to be used.
0 : Position control
1 : Speed control
2 : Torque control
3 : Position/speed
4 : Position/torque
5 : Torque/speed
0-
○○○○
SYS_02 Basic
* Absolute position
system
To set up whether to configure
absolute position system or not
when ABS motor is used.
0 : ABS
1 : INC
1
○
(002.2)
○○○○
SYS_03 Basic
*Encoder output pulse
To set up the number of encoder output
pulses output by servo amplifier when
servo motor rotates by 1 turn.
16 to 262144
(PLS/Rev)
2048
○
(212)
2 words
○○○○
SYS_04 Basic
Generative resistor
capacity
To set up capacity (W) of external
regenerative resistor.
0 to Servo amplifier
capacity
(x10W)
0
○
(600)
○○○○
SYS_05 Basic
*Motor rotate direction
*3
*3 When used together with KV-ML16V, please set this to "CCW". Otherwise, the unit cannot work properly.
To set up the forward direction of
motor.
0: CCW
1: CW
0
○
(000.0)
○○○○
Parameter
Category
Parameter
name
*1
Description
Set value/Setting
unit
Default
Enable type
*2
Control
mode
ML-II
PLS
Position
Speed
Torque
POS_01 Basic
*Command pulse
input type
To set up the pulse input format.
0: 1-pulse input,
positive logic
1: 2-pulse input,
positive logic
2: A/B phase (*1)
,
positive logic
3: A/B phase (*2)
,
positive logic
4: A/B phase (*4)
,
positive logic
5: 1-pulse input,
negative logic
6: 2-pulse input,
negative logic
7: A/B phase (*1),
n
egative logic
8: A/B phase (*2),
n
egative logic
9: A/B phase (*4),
n
egative logic
1-
○○
--
POS_02 Basic
*Electric gear
numerator
*3
The position command
(movement) is converted into
electric gear ratio (Electric gear
numerator /Electric gear
denominator) before servo motor is
operated.
1 to 1073741824 1
○
(20E)
2 words
○○
--
POS_03 Basic
*Electric gear
denominator
*3
1 to 1073741824 1
○
(210)
2 words
○○
--
*1 For parameters marked with "*", the power needs to be restarted after setup.
*2 ML-II is the short name for MECHATROLINK-II type and PLS the pulse/analog input type.
For MECHATROLINK-II, the number in the bracket is parameter number.
*3 Please set to "1" when used together with KV-ML16V. Otherwise, the unit cannot work properly.
 Loading...
Loading...