A-3
A-1List of Parameters
APPENDIX
- SV Series User’s Manual -
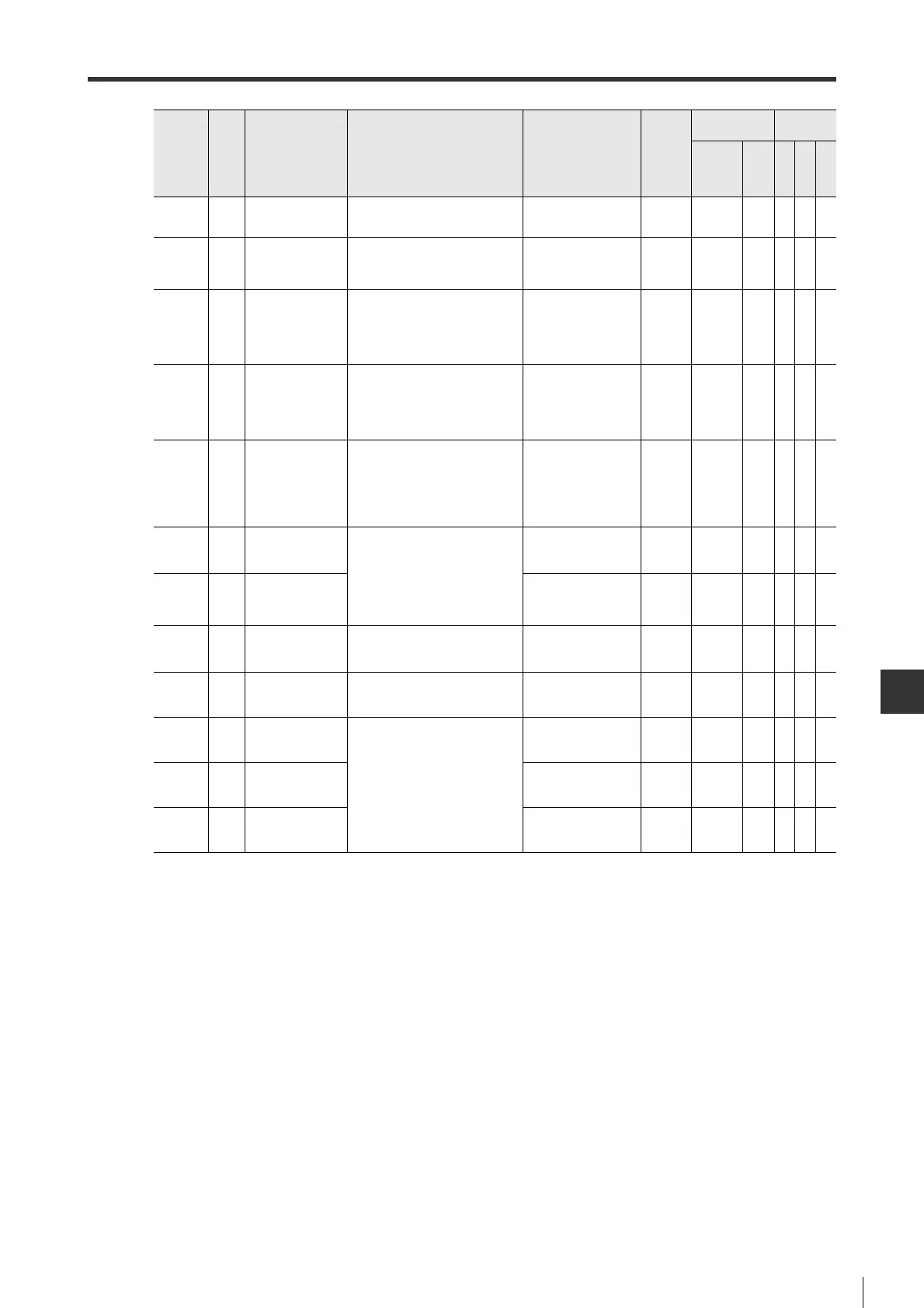
POS_04 Basic INPOS range
To output INPOS signal when the
absolute value of position deviation
is less than set value.
0 to 1073741824
(CMD_PLS or
ENC_PLS)
7
○
(522)
2 words
○○
--
POS_05
Extend
*Clear type
To set up the clear type of deviation
clear input.
0: ON level
1: OFF -> ON
2: OFF level
3: ON -> OFF
0-
○○
--
POS_06
Extend
*Clear operation
To set up position deviation clear
time.
0: Clear PosDeviation
(SVOFF/ALARM)
1: Does not clear
(only CLR can do)
2: Clear PosDeviation
(ALARM)
0-
○○
--
POS_07
Extend
*Command pulse
input filter
To set up pulse train input filter.
0: Open collector
signal (200kpps)
1: Line driver signal
(1Mpps)
1: Line driver signal
(4Mpps)
1-
○○
--
POS_08
Exten
d
*
INPOS timing
To set up the time for outputting
INPOS signal.
0: PosDeviation =<
INPOS range
1: (PosDev =<
INPOS) & cmd
after flt=0
2: (PosDev =<
INPOS) & cmd=0
0
○
(207.3)
○○
--
POS_09
Extend
Pos cmd accel/
decel time constant
To set up pulse input filter
(acceleration/deceleration time
constant).
It is used when acceleration/
deceleration cannot be set for the
higher-level equipment that sends
out command, or command pulse
frequency is extremely low.
0 to 65535
(x0.1ms)
0-
○○
--
POS_10
Extend
Pos cmd accel/
decel time constant
0 to 10000
(x0.1ms)
0-
○○
--
POS_11
Extend
NEAR range
*3
To output NEAR signal when the
absolute value of position deviation
is less than set value.
1 to 1073741824
(CMD_PLS or
ENC_PLS)
7
○
(524)
2 words
○○
--
POS_12
Special
*INPOS, NEAR unit
To set up the unit of INPOS range
and NEAR range.
0: CMD_PLS
1: ENC_PLS
0
○
(2D0.0)
○○
--
POS_13
Special
E-Gear numerator
multi-factor 1
Used for multiplying electric gear
ratio ("electric gear numerator"/
"electric gear denominator") by the
magnification set in the electric
gear magnification menu.
(GEAR1,GEAR2).
1 to 1073741824 1 -
○○
--
POS_14
Special
E-Gear numerator
multi-factor 2
1 to 1073741824 1 -
○○
--
POS_15
Special
E-Gear numerator
multi-factor 3
1 to 1073741824 1 -
○○
--
*1 For parameters marked with "*", the power needs to be restarted after setup.
*2 ML-II is the short name for MECHATROLINK-II type and PLS the pulse/analog input type.
For MECHATROLINK-II, the number in the bracket is parameter number.
*3 Generally, this is set to "7" when used together with KV-ML16V.
Parameter
Category
Parameter
name
*1
Description
Set value/Setting
unit
Default
Enable type
*2
Control
mode
ML-II
PLS
Position
Speed
Torque
 Loading...
Loading...