A-59
A-5MECHATROLINK-II Communication Commands
APPENDIX
- SV Series User’s Manual -
• When "SVOFF wait time" (ML_70) is set to a non-0 value, the deceleration constant is used to stop the
motor. After this, the servo is closed.
• When "SVOFF wait time" (ML_70) is set to "0", the servo is turned off immediately after receiving
SV_OFF command.
• After receiving SV_OFF command, speed command, speed feedforward, torque feedforward and
torque limit sent by position/speed control command will be cancelled.
Status monitoring (30H)[SMON]
Confirm the status of the servo amplifier.
Available phase : Phase 2 and Phase 3
Type of command : non-sync type
Reading cycle : Communication period
Sub command : Available
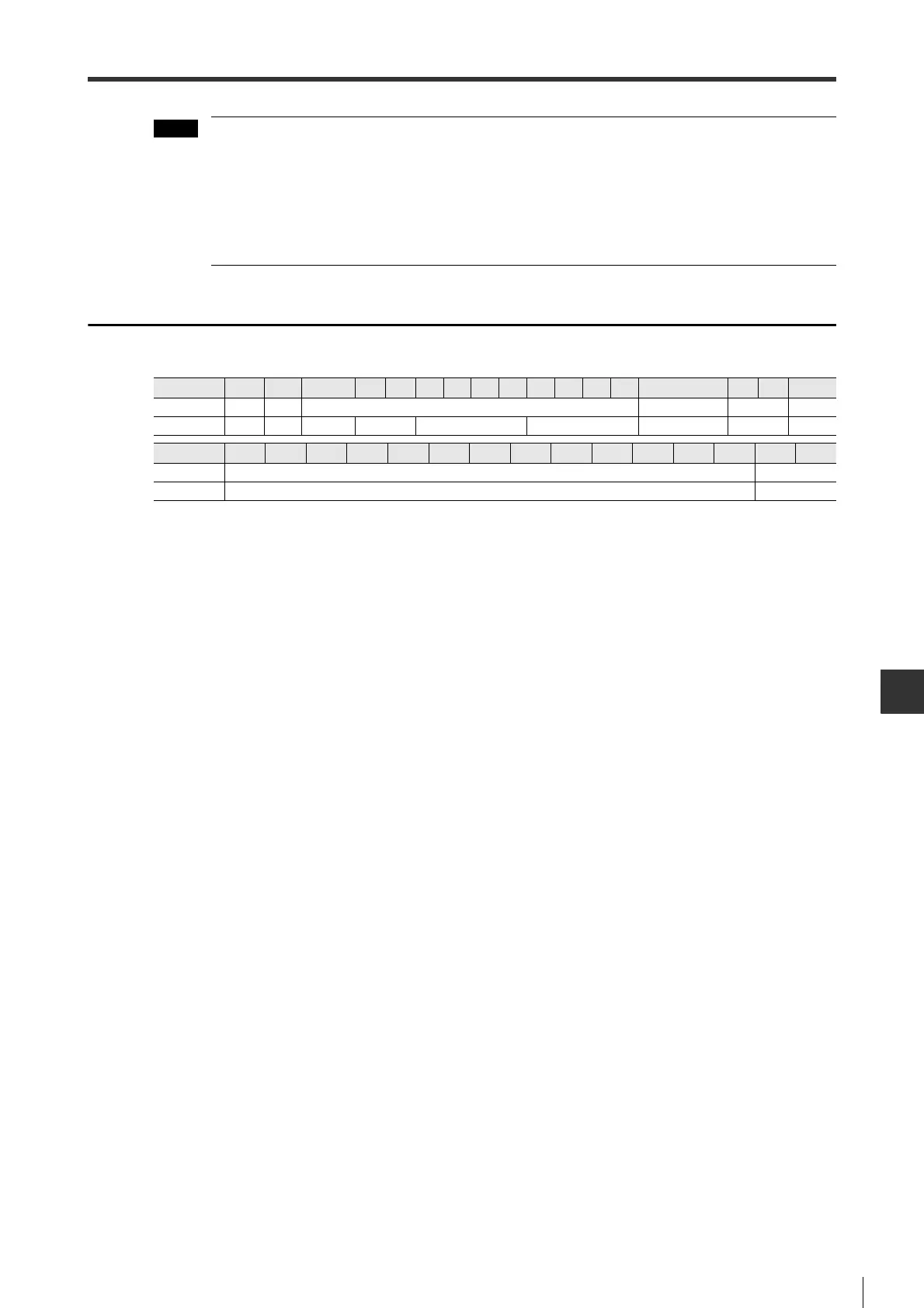
Byte 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
Command 03H 30H -
SEL_MON1/2
-WDT
Response 01H 30H
ALARM STATUS MONITOR1 MONITOR2 SEL_MON1/2 IO_MON
RWDT
Byte 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31
Command Sub command field Can't use
Response Sub command field Can't use
 Loading...
Loading...