A-73
A-5MECHATROLINK-II Communication Commands
APPENDIX
- SV Series User’s Manual -
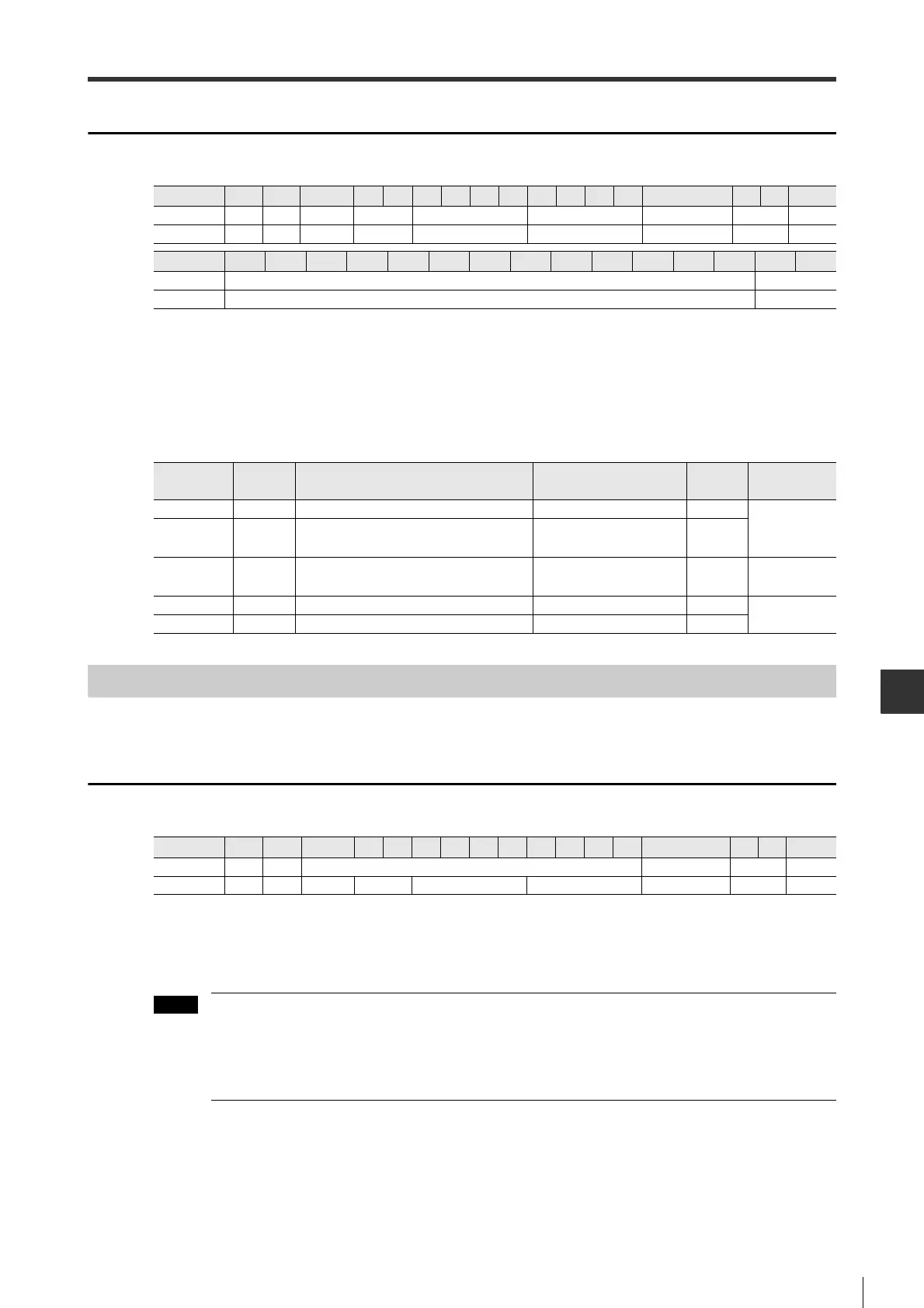
Torque control (3DH)[TRQCTRL]
To execute torque control.
Available phase : Phase 2 and Phase 3
Type of command : non-sync type
Reading cycle : < Communication period
Sub command : Available
■Relevant parameters
Other Commands
The other MECHATROLINK-II communication commands are as follows.
Brake operation request (21H)[BRK_ON]
The signal of braking is set to OFF, the braking starts.
Available phase : Phase 2 and Phase 3
Type of command : non-sync type
Reading cycle : < Communication period
Sub command : Can't use
After receiving command of BRK_ON, the BRAKE signal is outputted within 2ms.
The command of BRK_ON enables only in servo OFF.
The command of BRK_ON enables only after asigning signal of "electromagnetic brake timing (BRAKE)"
through "output1 asignment (IO_52)", "output2 asignment (IO_53)" and "output3 asignment (IO_54)"
Byte 0 1 2 3 4 5 6 7 8 9
10 11 12 13 14 15 16
Command 03H 25H -
OPTION
VLIM TQREF
SEL_MON1/2
-WDT
Response 01H 25H
ALARM STATUS
MONITOR1 MONITOR2
SEL_MON1/2 IO_MON
RWDT
Byte
17 18 19 20 21 22 23 24 25 26 27 28 29 30 31
Command Sub command field Can't use
Response Sub command field Can't use
Parameter
Category
Name Set value/setting unit Default
Enable
timing
VEL_05 Basic Speed limit during trq control 0 to 10000(min
-1
) 10000
After changing
ML_69 Special *Pos ctrl cmd TFF/TLIM
0: Disable
1: Enable
1
VEL_06 Basic *Speed limit method at torque control
0: Parameter
1: VLIM
0
When power is
ON again
TRQ_04 Basic Torque command accelerate time 0 to 10000(ms) 0
After changing
TRQ_05 Basic Torque command decelerate time 0 to 10000(ms) 0
Byte 0 1 2 3 4 5 6 7 8 9
10 11 12 13 14 15
16
Command 03H 21H -
SEL_MON1/2
-WDT
Response 01H 21H
ALARM STATUS
MONITOR1 MONITOR2
SEL_MON1/2 IO_MON
RWDT
 Loading...
Loading...