5-16
5-2 Common Function Setting
- SV Series User’s Manual -
COMMON PARAMETER SETTING
The zero clamp function can be set up through the following parameter.
With a lag, the zero clamp funciton can perform the following operation according to a speed command.
Speed command < (VEL_14) => zero clamp
Speed command ≧ (VEL_14 + 5[min
-1
]) => zero clamp release
Even if the set value exceeds max. speed of the servo motor, the max. speed will also be used as the
upper limit.
Speed Limit Setting (Torque Control Mode)
MECHATROLINK-II type
During speed limit, the internal speed limit value or the speed limit value based on MECHATROLINK-II
communication command will be input to the servo amplifier, and speed of the servo motor will be limited according to
the specified speed.
■ Speed limit method setting
Speed limit can be realized through a parameter set value or through VLIM.
Speed limit method can be set through a parameter.
● Speed limit based on VLIM
Speed will be limited through the data area of MECHATROLINK-II communication command (VLIM).
For details, see "A-4 MECHATROLINK-II Communication Commands", Page A-30 and User's Manual of the
high-level equipment.
When the MECHATROLINK-II type servo amplifier is used in combination with KV-ML16V, be sure to set
VEL_06 to "VLIM" under normal conditions.
● Speed limit based on parameters
Motor speed limit value can be set through a parameter. During torque control, the set value of speed limit will always
be enabled.
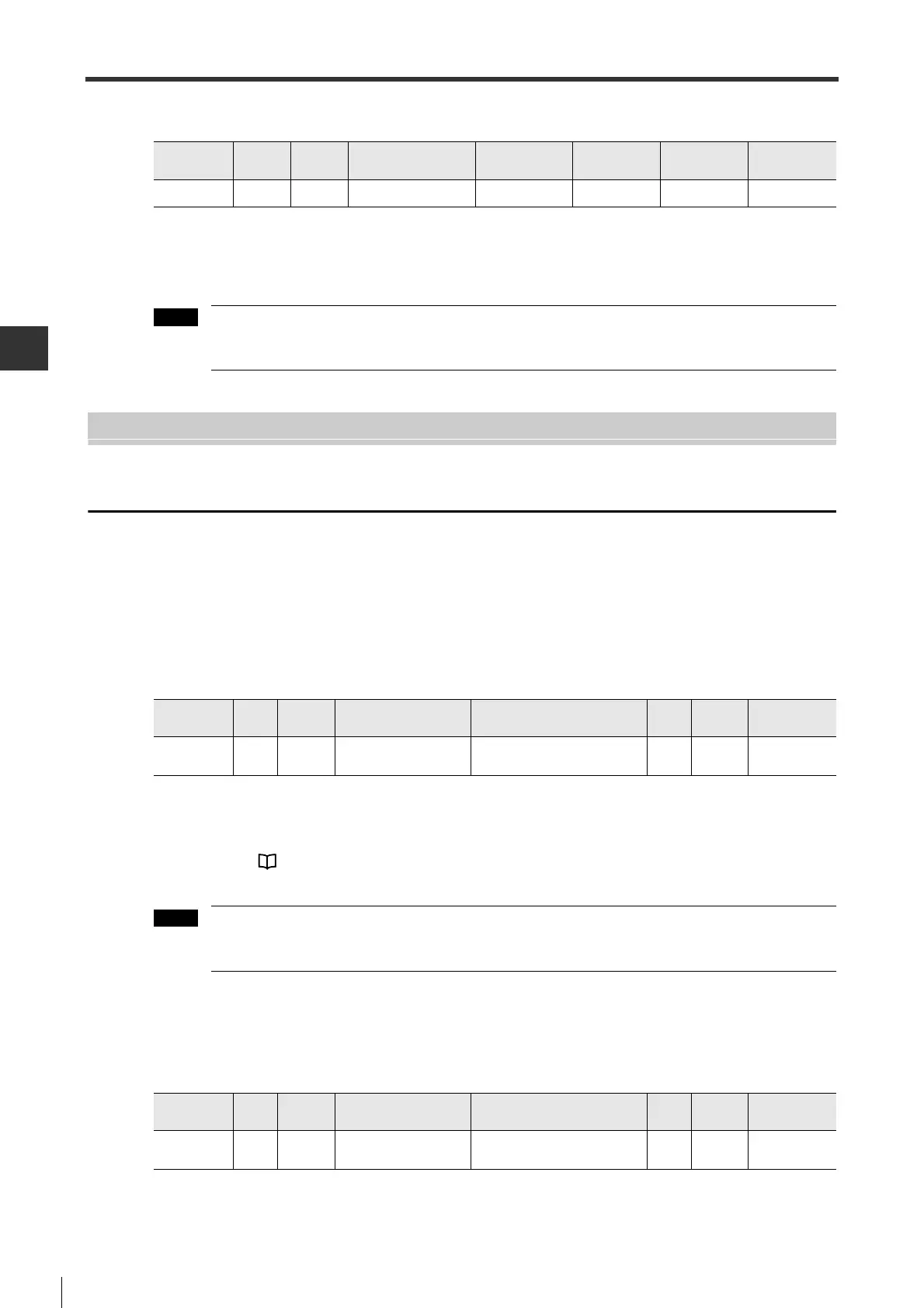
Parameter
type
Category
Level Parameter name Setting range Setting unit Default
Enable
timing
VEL_14 Speed
Extend
Zero clamp speed 0 to 10000 min
-1
10 After changing
Parameter
type
Category
Level Parameter name Setting range
Setting
unit
Default
Enable
timing
VEL_06 Speed Basic *Speed limit method
0 : Parameter only
1 : VLIM
-0
After power is
ON again
Parameter
type
Category
Level Parameter name Setting range
Setting
unit
Default
Enable
timing
VEL_05 Speed Basic
Speed limit during torque
control
0 to 10000 min
-1
10000 After changing
 Loading...
Loading...