5-8
5-2 Common Function Setting
- SV Series User’s Manual -
COMMON PARAMETER SETTING
The setting unit will vary with number of output pulses. If a condition is not satisfied, then the "Encoder pulse setting
error" alarm (041) will occur.
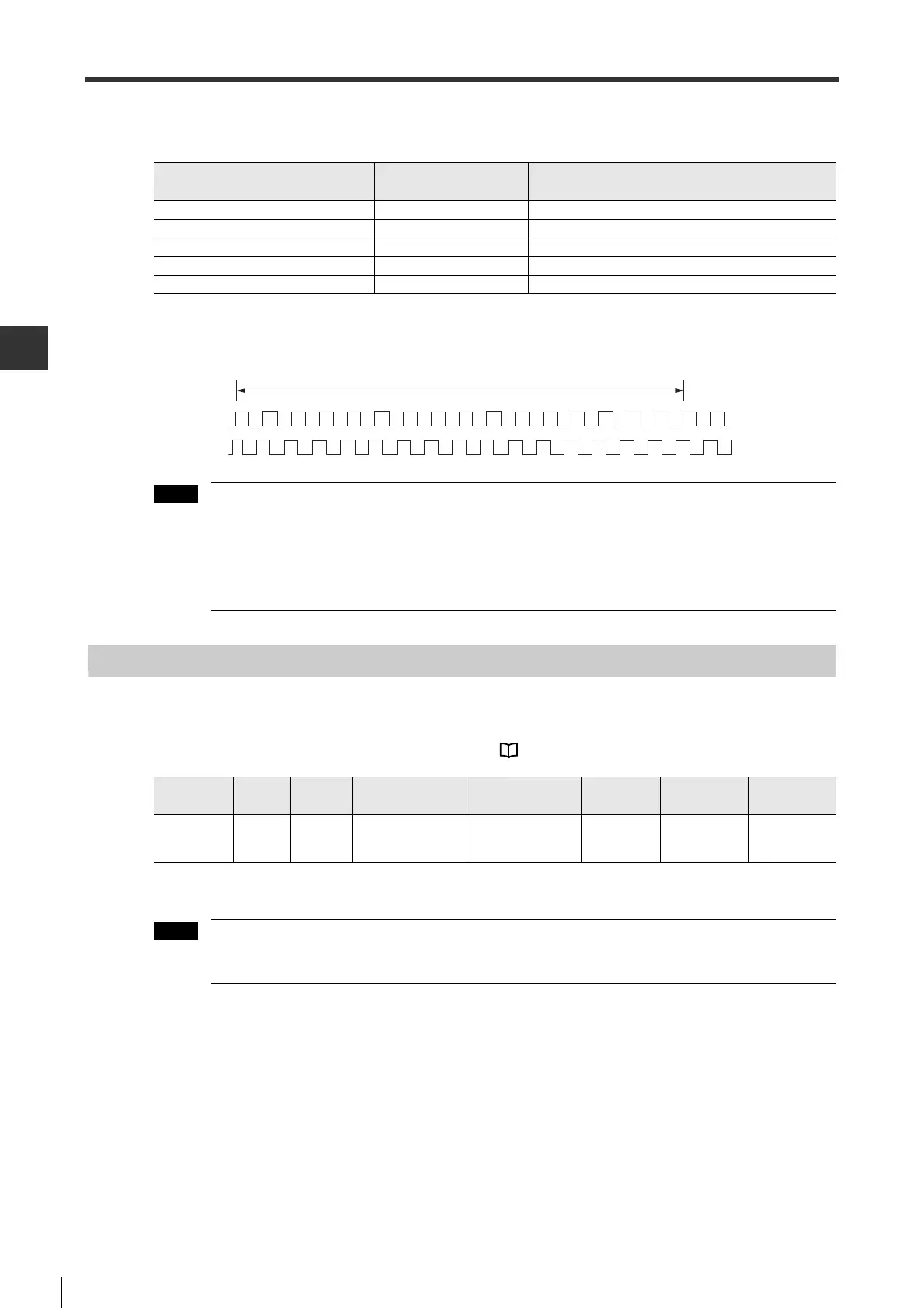
Example) Output of A-phase/B-phase will be shown as follows when the "encoder output pulse" (SYS_03) is set to 16
(16 pulses per revolution).
• Upper limit of encoder pulse output frequency is 1.6 Mpps (6.4 Mhz for 2-phase 4x). The larger the set value, the
higher the motor speed. When it exceeds 1.6 Mpps, "Encoder pulse overspeed" alarm (511) will occur.
• When an INC servo motor is used or a ABS type servo motor is used as an INC one, be sure to rotate the motor
more than one revolution and perform origin return before counting the output pulses. Otherwise, offset of output
pulses may occur.
Zero Speed Detection Setting
When feedback speed of a servo motor is lower than set value of zero speed detection range, a "Zero speed
detection (ZSP)" signal will be output.
For wiring of the "Zero speed detection (ZSP)" signal, see "4-5 Wiring I/O Signals", Page 4-24.
Zero speed detection range has a 5 min
-1
lag. When feedback speed is above "Zero speed detection range + 5min
-1
",
output will be OFF.
Even if the set value exceeds max. speed of the servo motor, max. speed of the servo motor will also be
used as the upper limit value.
Number of encoder output
pulses
Setting unit (PLS/Rev)
Upper limit of motor speed at this setting
(min
-1
)
16 to 16384 1 6000
16386 to 32768 2 3000
32772 to 65536 4 1500
65544 to 131072 8 750
131088 to 262144 16 375
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
A-phase
B-phase
1 revolution = 16 pulses
Parameter
type
Category
Level Parameter name Setting range
Setting
unit
Default
Enable
timing
VEL_15 Speed
Extend
Zero speed
detection range
1 to 10000 min
-1
20 After changing
 Loading...
Loading...