7-18
7-5 Torque Control
- SV Series User’s Manual -
PARAMETER SETTING AND OPERATION OF PULSE/ANALOG INPUT
Torque Command Setting
Torque command is applied through the "Analog torque command (T-REF)" input.
■ How to set up torque command
Analog input torque command is connected to the following terminals.
For wiring, see "4-5 Wiring I/O Signals", Page 4-24.
■ Switching external input signal direction
Depending on "Forward selection (ST1)" /"Reversal selection (ST2)" status, the servo motor status changes as follows:
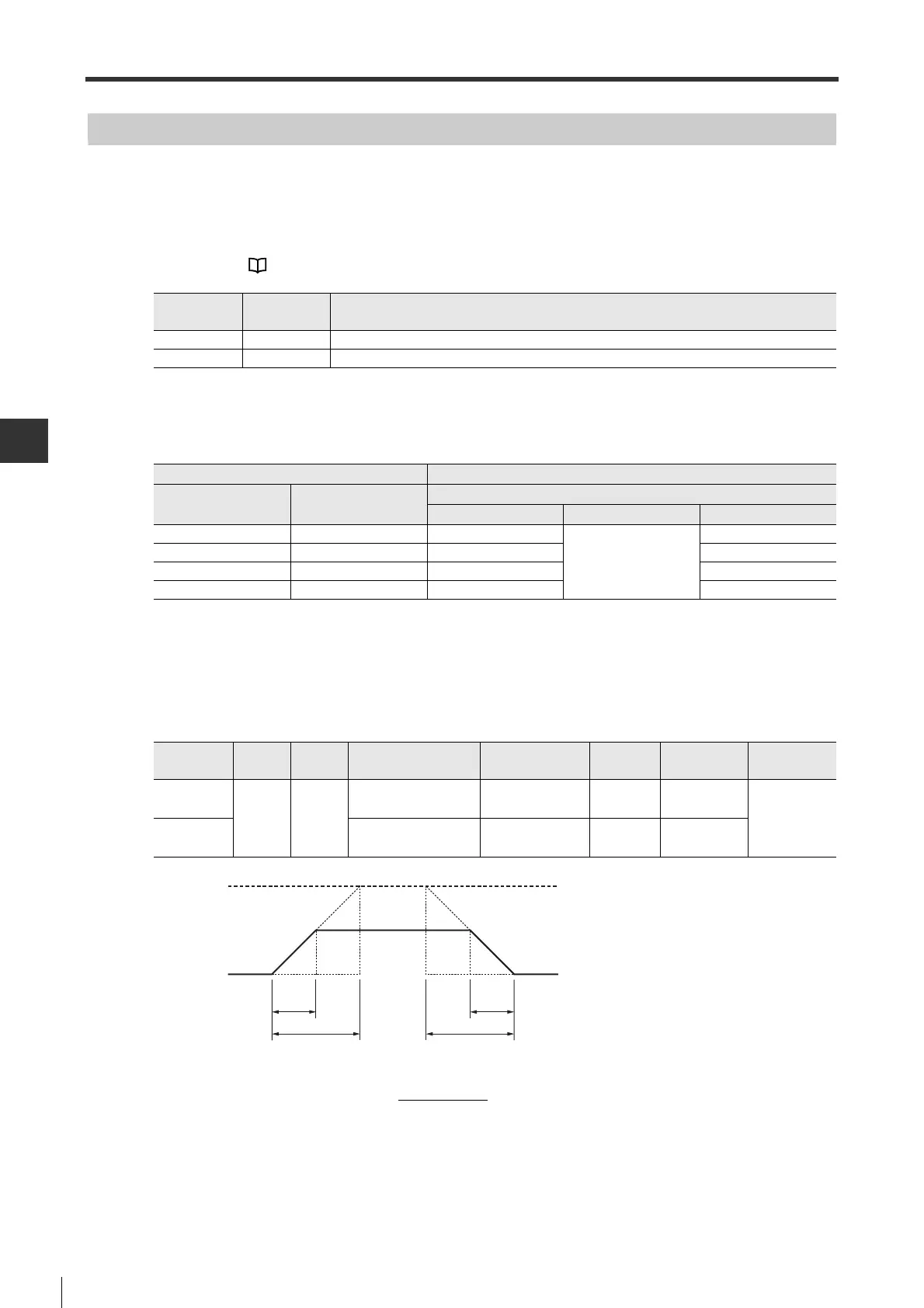
■ Toque command soft start
This allows smoothing the step type torque command input like an acceleration/deceleration to some extent.
• Acceleration time: the time for motor from stop status to max torque.
• Deceleration time: the time for motor from max torque to stop status.
Actual accelerate (decelerate) time = x TRQ_04(TRQ_05)
Signal
name
Level Terminal
T-REF 5 Analog torque command
SG 6 Signal ground
External input signal Servo monitor status
Forward selection
(RS1)
Reversal selection
(RS2)
Analog torque command (T-REF)
+ 10 kHz
-
OFF OFF 0%
0%
0%
ON OFF CCW CW
OFF ON CW CCW
ON ON 0% 0%
Parameter
type
Category
Level Parameter name Setting range
Setting
unit
Default
Enable
timing
TRQ_04
Torque Basic
Torque command
accelerate time
0 to 10000 ms 0
After changing
TRQ_05
Torque command
decelerate time
0 to 10000 ms 0
Actual
accelerate
time
Actual
decelerate
time
TRQ_04
Max. torque
Motor stops
TRQ_05
Torque command
Max. toque
 Loading...
Loading...