7-9
7-3 Position Control
PARAMETER SETTING AND OPERATION OF PULSE/ANALOG INPUT
- SV Series User’s Manual -
Deviation Clear (CLR) Setting
A position deviation can be cleared by inputting the "CLR (deviation clear)" signal.
When "Deviation clear(CLR)" signal is input, since the deviation counter is 0, any command input pulse is then
ignored. And the position loop is disabled.
These can set with the following parameters:
When "Does not clear (only CLR can do)" is selected, position deviation cannot be cleared even an alarm
occurs. So once the servo is ON after the alarm is reset, the machine may operate immediately.
Position Command Smoothing Function Setting
The movement of servo motor can be smoothed by filtering the command pulse. This is useful when it is impossible to
apply acceleration/deceleration command from the higher-level equipment or the command pulse has a lower
frequency.
This can be set up with the following parameters.
•
The setting of position command smoothing will not affect the movement (number of command pulses).
• Filter is disabled when setting to 0.
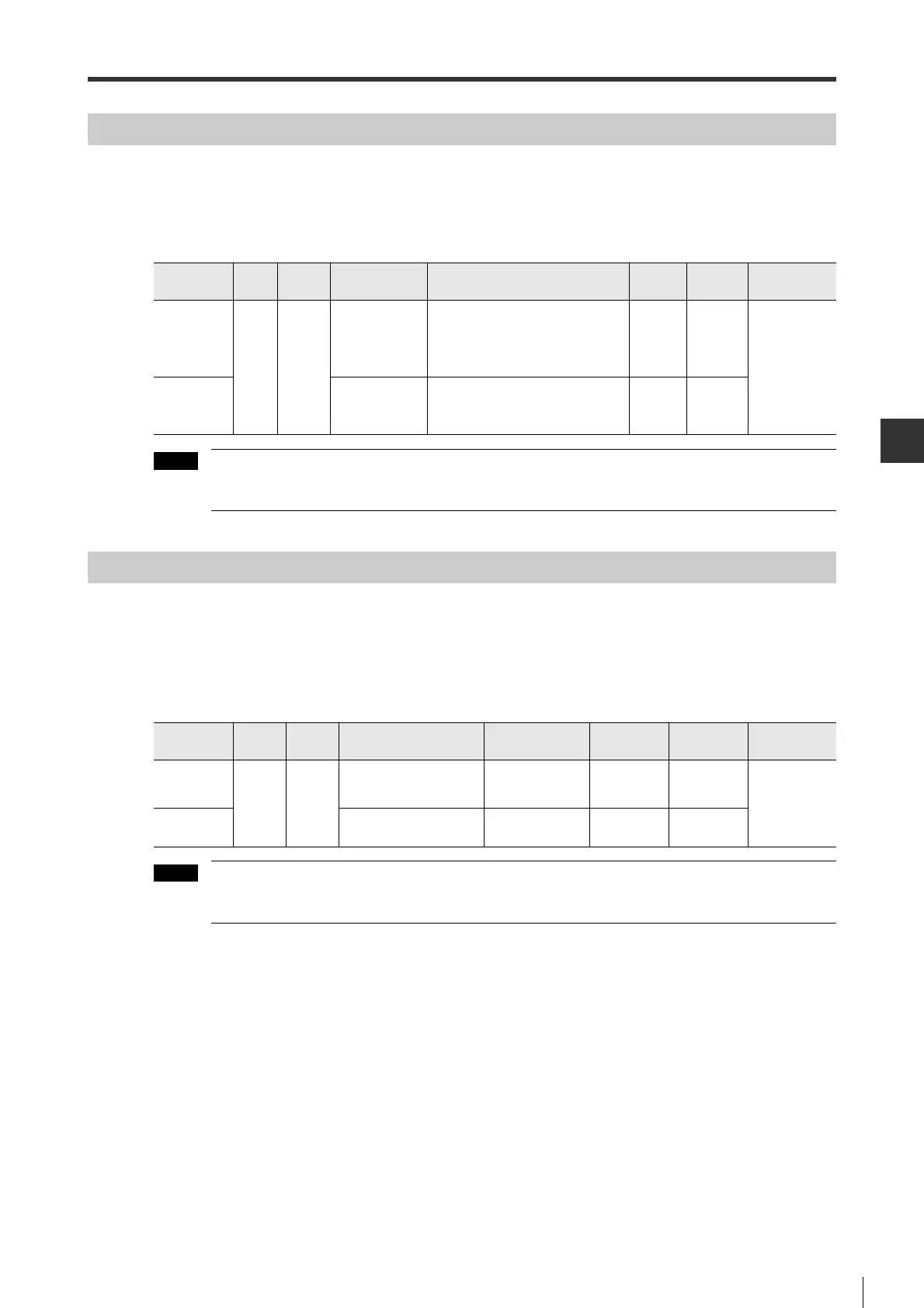
Parameter
type
Cate
gory
Level
Parameter
name
Setting range
Setting
unit
Default
Enable
timing
POS_05
Position
Extend
*Clear type
0: ON Level
1: OFF->ON
2: OFF Level
3: ON->OFF
-0
When power is
ON again
POS_06
*Clear operation
0:
Clear PosDeviation (SVOFF/ALARM)
1:
Does not clear (only CLR can do)
2: Clear PosDeviation (ALARM)
-0
Parameter
type
Category
Level Parameter name Setting range
Setting
unit
Default
Enable
timing
POS_09
Position Extend
Pos cmd accel/decel time
constant
0 to 65535 0.1ms 0
After changing
POS_10
Average movement time
of pos cmd
0 to 10000 0.1ms 0
 Loading...
Loading...