5-11
5-2 Common Function Setting
COMMON PARAMETER SETTING
- SV Series User’s Manual -
• When several types of torque limit are enabled simultaneously, torque will be limited according to the
min. value of the torque limit in enabled status.
• When "*Torque feedforward" (TUN_34) is set to "Enable", analog torque limit cannot be used.
• When the "Forward torque limit selection (PTL)" input and the "Revarsal torque limit selection (NTL)"
input are not assigned to I/O terminals, the "Forward torque limit selection (PTL)" input and the
"Revarsal torque limit selection (NTL)" input will always be disabled.
• The value of "Analog torque limit (T-REF)" is used as an ABS value.
• Even if the set value exceeds max. torque of the servo motor, max. torque of the servo motor will also be
used as the upper limit.
•
Disabled during limit switch input. Torque will be limited according to setting of "*Limit switch stop mode"
(ALM_03)/ "Torque limit at limit switch ON" (ALM_04) during limit switch input.
• "Analog torque limit (T-REF)" will be disabled during servo trial run of torque control (servo JOG operation/Z-
phase search).
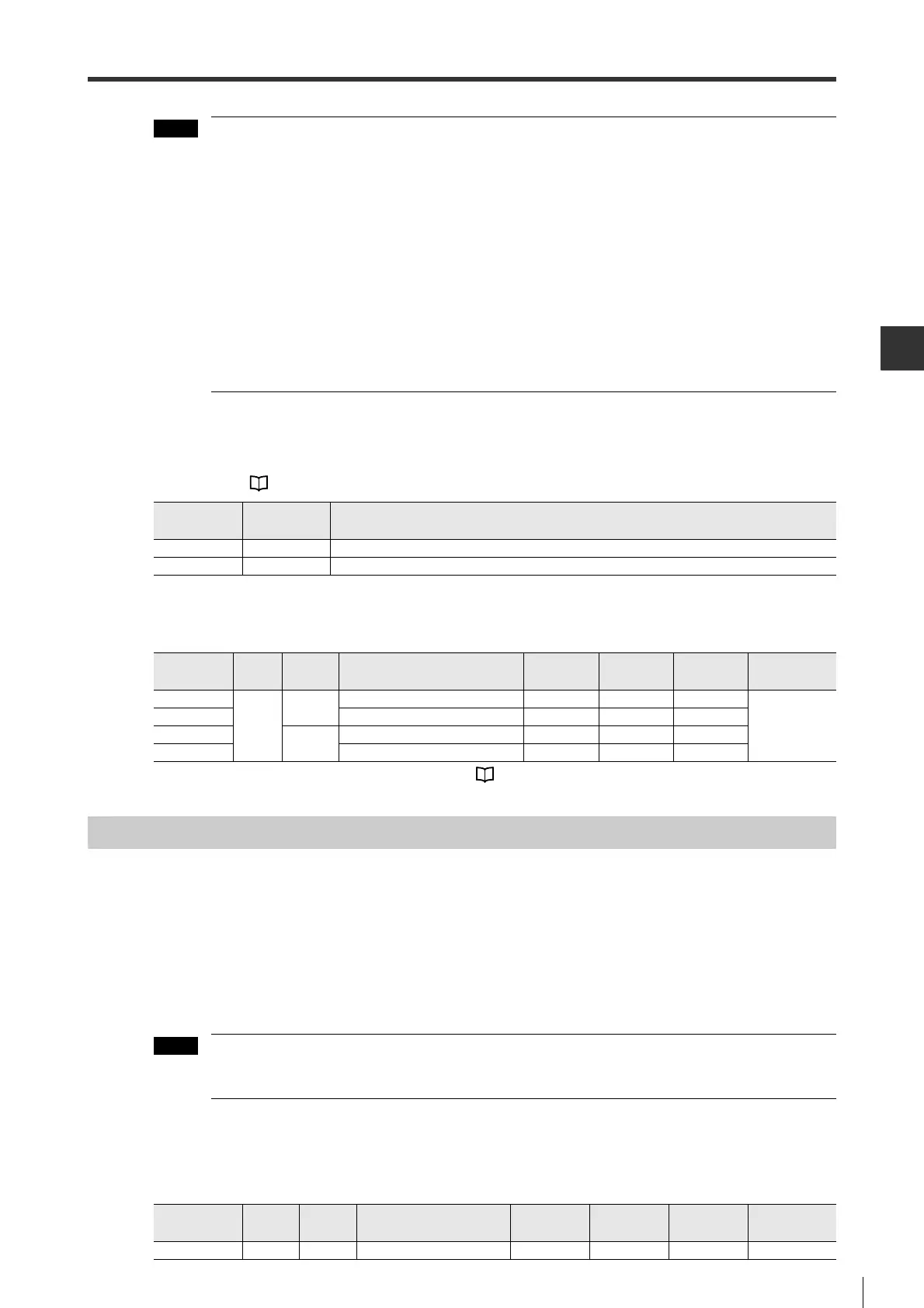
● Torque limit based on analog input
Wiring of the following terminals is required when torque is limited through analog voltage.
For wiring, see "4-5 Wiring I/O Signals", Page 4-24.
● Torque limit based on parameters
Internal torque limit value will be set through a parameter.
For the setting/adjustment of analog torque input, see "7-5 Torque Control", Page 7-17.
Motor Overload Detection Level Setting
To set up how to detect overload alarm/overload warning that will occur when a continuous load over rated value is applied to
the servo motor.
■ Motor overload alarm
When a load over rated value is applied to the servo motor, damage of the servo motor and corresponding equipment
can be prevented through detecting the "Overload (peak)" alarm (710) and the "Overload (continuous)" alarm (720)
and stopping operation of the servo motor.
When the "Overload (
peak
)" alarm (710) and "Overload (continuous)" alarm (720) occur on the servo motor,
if power of the servo amplifier is ON again, a "Overload warning" (910) will occur.
■ Motor overload warning
After overload warning level is changed, the time to detect overload warning can be changed.
The overload warning level can be set through a parameter.
Signal
name
Pin No. Parameter name
T-REF 5 Analog torque limit
SG 6 Signal ground
Parameter
type
Category
Level Parameter name
Setting
range
Setting
unit
Default
Enable
timing
TRQ_02
Torque
Basic
P-torque limit 1
0 to 800 % 800
After changing
TRQ_03
N-torque limit 1
0 to 800 % 800
TRQ_07
Extend
P-torque limit 2 0 to 800 % 100
TRQ_08 N-torque limit 2 0 to 800 % 100
Parameter
type
Category
Level Parameter name
Setting
range
Setting
unit
Default
Enable
timing
ALM_08 Alarm
Extend
Overload warning 1 to 100 % 20 After changing
 Loading...
Loading...