A-40
APPENDIX
A-5MECHATROLINK-II Communication Commands
- SV Series User’s Manual -
List of MECHATROLINK-II communication commands
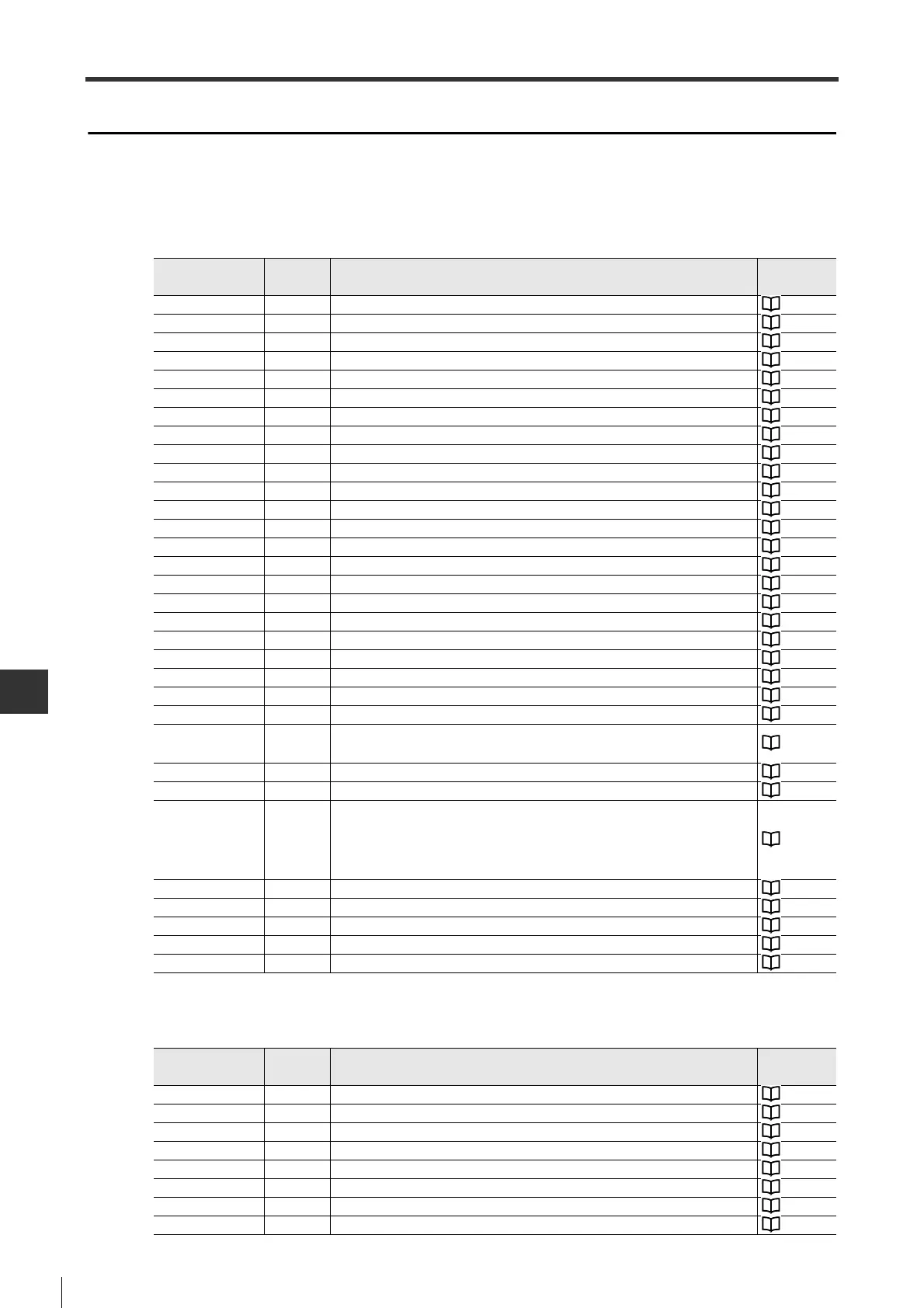
MECHATROLINK-II communication commands are classified into main command and sub command. The list of
commands is as follows.
■List of main commands
■List of Sub Commands
Command
Comman
d code
Command description See page
NOP 00H No operation executed. A-53
PRM_RD 01H Read parameters A-55
PRM_WR 02H To save parameters. A-56
ID_RD 03H To read the ID of servo motor. A-54
CONFIG 04H Enable parameters set A-57
ALM_RD 05H Read alarm/warning occurred and alarm log. A-60
ALM_CLR 06H Clear alarm/warning occurred and alarm log. A-60
SYNC_SET 0DH To start sync communication. A-61
CONNECT 0EH To establish connection. A-55
DISCONNECT 0FH To cut off connection. A-54
PPRM_WR 1CH To store parameters to the flash memory. A-56
POS_SET 20H To set up coordinate. A-61
BRK_ON 21H To start electromagnetic brake signal. A-73
BRK_OFF 22H To stop electromagnetic brake signal. A-74
SENS_ON 23H Turn on the power of encoder to capture position data. A-57
SENS_OFF 24H Turn the modem OFF. A-58
HOLD 25H Slow down to stop with the deceleration set up and perform positioning. A-62
LTMOD_ON 28H Enable latching of position data caused by external input signal. A-63
LTMOD_OFF 29H Disable latching of position data caused by external input signal. A-64
SMON 30H Indicates status of the servo amplifier. A-59
SV_ON 31H Set the servo motor to servo ON status. A-58
SV_OFF 32H Set the servo motor to servo OFF status. A-58
INTERPOLATE 34H To execute the interpolation transfer. A-65
POSING 35H
The target position (TPOS) is positioned according to the target speed
(TSPD).
A-65
FEED 36H To transfer with the target speed (TSPD). A-67
LATCH 38H To latch position with the latching signal specified in interpolation transfer. A-68
EX_POSING 39H
The target position (TPOS) is positioned according to the target speed
(TSPD).When a latching signal is input, positioning is made from the latching
signal input position to the position parameterized plus the tavel caused by
the latching signal input.
A-69
ZRET 3AH To execute origin return operation. A-70
VELCTRL 3CH To execute speed control. A-72
TRQCTRL 3DH To execute torque control. A-73
ADJ 3EH To monitor and adjust servo motor. A-75
SVCTRL 3FH To control normal servo applicable to MECHATROLINK-II communication. A-74
Command
Comman
d code
Command description See page
NOP 00H No operation executed. A-76
PRM_RD 01H Read parameters A-76
PRM_WR 02H To save parameters. A-76
ALM_RD 05H Read alarm/warning occurred and alarm log. A-76
PPRM_WR 1CH To store parameters to the flash memory. A-76
LTMOD_ON 28H Enable latching of position data caused by external input signal. A-77
LTMOD_OFF 29H Disable latching of position data caused by external input signal. A-77
SMON 30H Indicates status of the servo amplifier. A-77
 Loading...
Loading...