TUNING
8-19
- SV Series User’s Manual -
8-5 Gain Tuning PRO
This allows, on one hand, manual adjustment of response and stability level, and on the other hand, receiving commands
from higher-level positioning/motion unit to control the servo motor, until an optimal gain is achieved.
This method takes a longer time due to manual adjustment and adjustment effect checking. But this method delivers a much
finer adjustment.
Gain tuning PRO is enabled in position control mode and speed control mode. It is disabled in torque control mode.
Parameters adjusted automatically in Gain tuning PRO:
• Gain adjustment (position control gain, speed control gain, integral time constant etc)
• Filter adjustment (torque command LPF/Notch filter)
• Friction compensation
• Anti-resonance frequency control
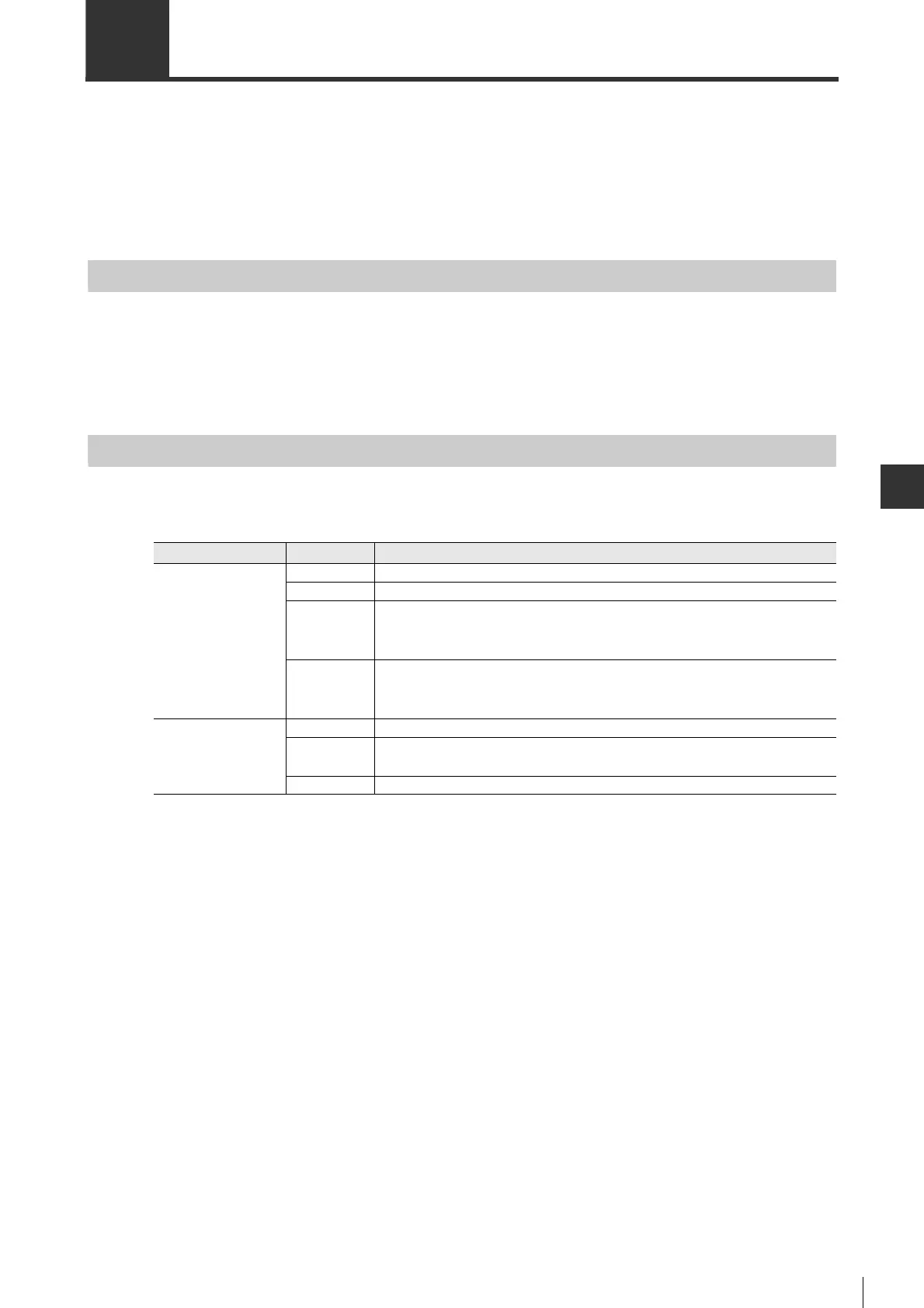
Setting of Tuning Type and Filter Type
To meet different tuning requirements, Gain search PRO provides two types of parameters, the tuning type and filter type.
Their target set values are listed in the table.
Parameter Set Purpose or mechanism examples
Tuning type
Stability (L) Delivers a higher stability.
Stability (H) Delivers a higher stability. But has a higer response performance than (L). (Default)
Response
characteristics
(L)
An internal mode is used. Delivers a higher response performance. has a better
overshoot suppression than (H).
*It can be used only in position control mode.
Response
characteristics
(H)
An internal mode is used. Delivers a higher response performance.
*It can be used only in position control mode.
Filter type
Belt For belt-driven mechanism with a low rigidness.
Lead screw
For ball screw-driven mechanism with a high rigidness .
(default)
Rigid body For mechanisms which are driven by rigid body such as gears and cams.
 Loading...
Loading...