A-4
APPENDIX
A-1List of Parameters
- SV Series User’s Manual -
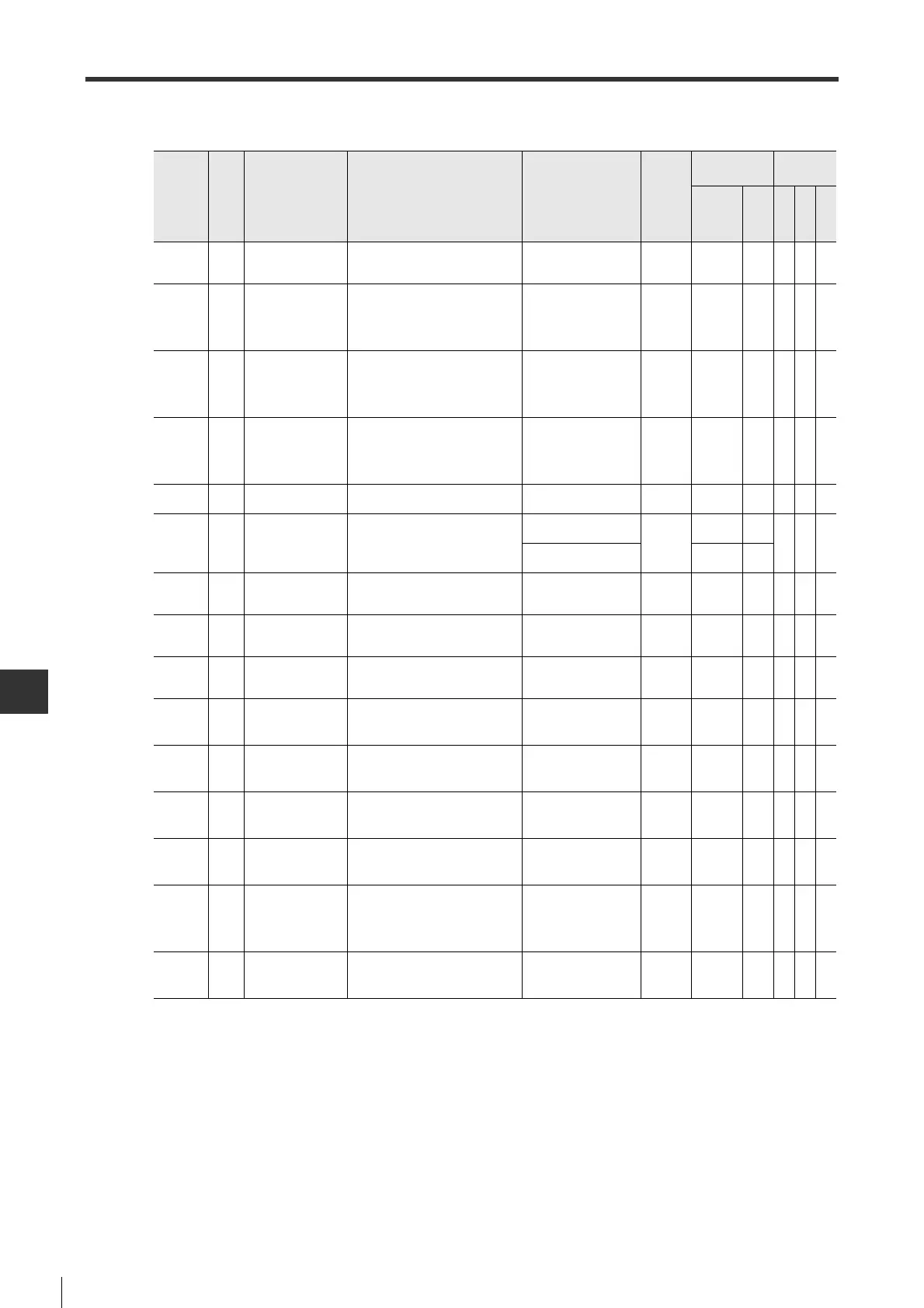
■Speed-related parameters
Parameter
Category
Parameter
name
*1
Description
Set value/Setting
unit
Default
Enable type
*2
Control
mode
ML-II
PLS
Position
Speed
Torque
VEL_01 Basic V-REF input gain
To set up the gain of analog speed
command (V-REF) input (input
voltage at rated speed).
150 to 3000
(0.01V/RAT)
600 -
○○○○
VEL_02 Basic
Speed control
accelerate time
*3
To set up the acceleration time
relative to speed command.
To set up the time required for
servo motor from stop status up to
max speed.
0 to 10000(ms) 0
○
(305)
○
-
○
-
VEL_03 Basic
Speed control
decelerate time
*3
To set up the deceleration time
relative to speed command.
To set up the time required from
max speed of servo motor to stop
status.
0 to 10000(ms) 0
○
(306)
○
-
○
-
VEL_04 Basic Speed match range
To output speed match (VCMP)
signal when the absolute value of
the difference between motor
speed and command speed is less
than set value.
0 to 100(min
-1
)10
○
(503)
○
-
○
-
VEL_05 Basic
Speed limit during
trq control
To set up speed limit during torque
control.
0 to 10000(min
-1
) 10000
○
(407)
○
--
○
VEL_06 Basic
*Speed
limit method
*4
To set up speed limit method
during torque control.
0: Parameter only
1: VLIM
0
○
(002.1)
-
--
○
0: Parameter only
1: SPD1, 2, 3
-
○
VEL_07 Basic
Setting command
speed 1
To set up setting command speed
1.
(Enabled when SPD1=ON,
SPD2=OFF and SPD3=ON).
0 to 10000(min
-1
)100-
○
-
○○
VEL_08 Basic
Setting command
speed 2
To set up setting command speed
2.
(Enabled when SPD1=OFF,
SPD2=ON and SPD3=OFF).
0 to 10000(min
-1
)200-
○
-
○○
VEL_09 Basic
Setting command
speed 3
To set up setting command speed
3. (Enabled when SPD1=ON,
SPD2=ON
and SPD3=OFF).
0 to 10000(min
-1
)300-
○
-
○○
VEL_10
Extend
Setting command
speed 4
To set up setting command speed
4. (Enabled when SPD1=OFF,
SPD2=OFF and SPD3=ON).
0 to 10000(min
-1
)400-
○
-
○○
VEL_11
Extend
Setting command
speed 5
To set up setting command speed
5. (Enabled when SPD1=ON,
SPD2=OFF and SPD3=ON).
0 to 10000(min
-1
)500-
○
-
○○
VEL_12
Extend
Setting command
speed 6
To set up setting command speed
6. (Enabled when SPD1=OFF,
SPD2=ON and SPD3=ON).
0 to 10000(min
-1
)600-
○
-
○○
VEL_13
Extend
Setting command
speed 7
To set up setting command speed
7. (Enabled when SPD1=ON,
SPD2=ON and SPD3=ON).
0 to 10000(min
-1
)700-
○
-
○○
VEL_14
Extend
Zero clamp speed
To set up the speed for enabled
zero clamp function.
If ZCLAMP signal is ON, servo is
locked when command input speed
is less than the set speed.
0 to 10000(min
-1
)10
○
(501)
○
-
○
-
VEL_15
Extend
Zero speed
detection range
To output ZSP signal when motor
speed is less than the set value.
1 to 10000(min
-1
)20
○
(502)
○○○○
*1 For parameters marked with "*", the power needs to be restarted after setup.
*2 ML-II is the short name for MECHATROLINK-II type and PLS the pulse/analog input type.
For MECHATROLINK-II, the number in the bracket is parameter number.
*3 When executing origin return with KV-ML16V being connected, all the settings related to origin return of KV-
ML16V are automatically changed. When origin return is complete, these settings are restored.
Therefore, do not change parameter settings during origin return.
*4 Generally, it is set to "VLIM" when used together with KV-ML16V.
 Loading...
Loading...