A-5
A-1List of Parameters
APPENDIX
- SV Series User’s Manual -
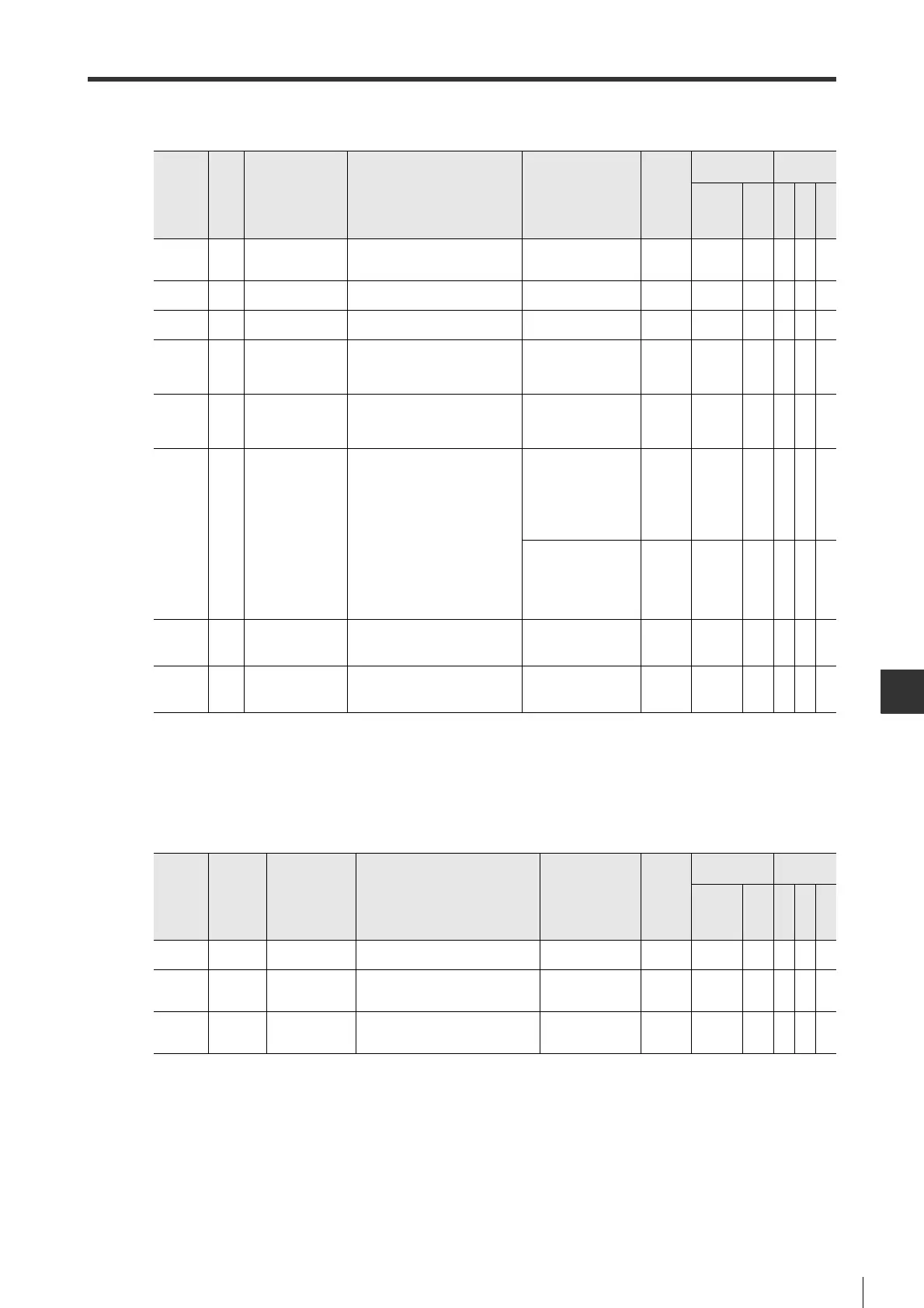
■Torque-related parameters
■Tuning-related parameters
Parameter
Category
Parameter
name
*1
Description
Set value/Setting
unit
Default
Enable type
*2
Control
mode
ML-II
PLS
Position
Speed
Torque
TRQ_01 Basic T-REF input gain
To set up the gain of analog torque
command (T-REF) input (input
voltage at rated torque).
10 to 100 (x0.1V/rated
torque)
30 -
○○○○
TRQ_02 Basic P-torque limit 1 To set up forward torque limit. 0 to 800(%) 800
○
(402)
○○○○
TRQ_03 Basic N-torque limit 1 To set up reversal torque limit. 0 to 800(%) 800
○
(403)
○○○○
TRQ_04 Basic
Torque control
accelerate time
To set up acceleration time relative
to torque command.
To set up the time required from
torque command =0 to max. torque.
0 to 10000(ms) 0
○
(4D0)
○
--
○
TRQ_05 Basic
Torque control
decelerate time
To set up deceleration time relative to
torque command.
To set up the time required from
torque command = max. torque to 0.
0 to 10000(ms) 0
○
(4D1)
○
--
○
TRQ_06 Basic
*Torque limit
method
*3
To set up torque limit method.
0 : Only TrqLim1 is valid.
1 : TrqLim2 is valid (P/NTL)
2 :
P_TLIM, N_TLIM are valid
3 : P_TLIM, N_TLIM are
valid (P/NTL)
4 : TrqLim2 & PN_TLIM
valid (P/NTL)
0
○
(4D2)
-
○○○
0 : Only TrqLim1 is valid.
1 : TrqLim2 is valid (P/NTL)
2 : T-REE is valid
3 : T-REE is valid (P/NTL)
4 : TrqLim2 & T-REE valid
(P/NTL)
0-
○○○○
TRQ_07
Extend
P-torque limit 2 To set up forward torque limit. 0 to 800(%) 100
○
(4D4)
○○○○
TRQ_08
Extend
N-torque limit 2 To set up reversal torque limit. 0 to 800(%) 100
○
(4D5)
○○○○
*1 For parameters marked with "*", the power needs to be restarted after setup.
*2 ML-II is the short name for MECHATROLINK-II type and PLS the pulse/analog input type.
For MECHATROLINK-II, the number in the bracket is parameter number.
*3 Generally, it is set to "P_TLIM, N_TLIM are valid" when used together with KV-ML16V.
Parameter
Category
Parameter
name
*1
Description
Set value/Set-
ting unit
Default
Enable type
*2
Control
mode
ML-II
PLS
Position
Speed
Torque
TUN_01 Basic *Tuning mode
To set up gain adjustment method.
0: Manual tuning
1:
Auto tuning
1
○
(170.0)
○○○
-
TUN_02 Basic
Auto tuning
response
To set up the value suitable for me-
chanical system rigidity when auto
tuning is used.
0 to 15 5
○
(170.2)
○○○
-
TUN_03 Basic
Auto tuning
load level
To set up ratio of load inertia moment
level (size) of mechanical system
when auto tuning is used.
1 : low load
2 : high load
1
○
(170.3)
○○○
-
*1 For parameters marked with "*", the power needs to be restarted after setup.
*2 ML-II is the short name for MECHATROLINK-II type and PLS the pulse/analog input type.
For MECHATROLINK-II, the number in the bracket is parameter number.
 Loading...
Loading...