A-43
A-5MECHATROLINK-II Communication Commands
APPENDIX
- SV Series User’s Manual -
● Normal operation
*1 In case the connection cannot be cut off, send DISCONNECT command for at least two periods, then send
CONNECT command.
*2 Not required for INC servo amplifier.
■Other operation sequences
The operations using MECHATROLINK-II communication commands for specific cases are as follows:
● For Servo ON
Only in the "Servo ON" mode could SV series perform opeation controls using MECHATROLINK-II communication
commands from high-level equipment.
When servo OFF, the servo amplifier is used for position management to make command pulse equal to feedback
pulse.
To ensure MECHATROLINK-II communication command is sent correctly, SMON needs to be executed after Servo
ON is over to confirm the status of servo monitor, and an appropriate position command is also sent.
To enable Servo ON, be sure the status field read via SMON is PON=1, ALM=0 before SV_ON command is sent
● For position limiting
Once the limit switch signal is input, servo amplifier stops the motor according to the method set in the "Limit switch
stop mode" (ALM_03).
In this case, the following steps need to be followed to cancel the limit switch signal.
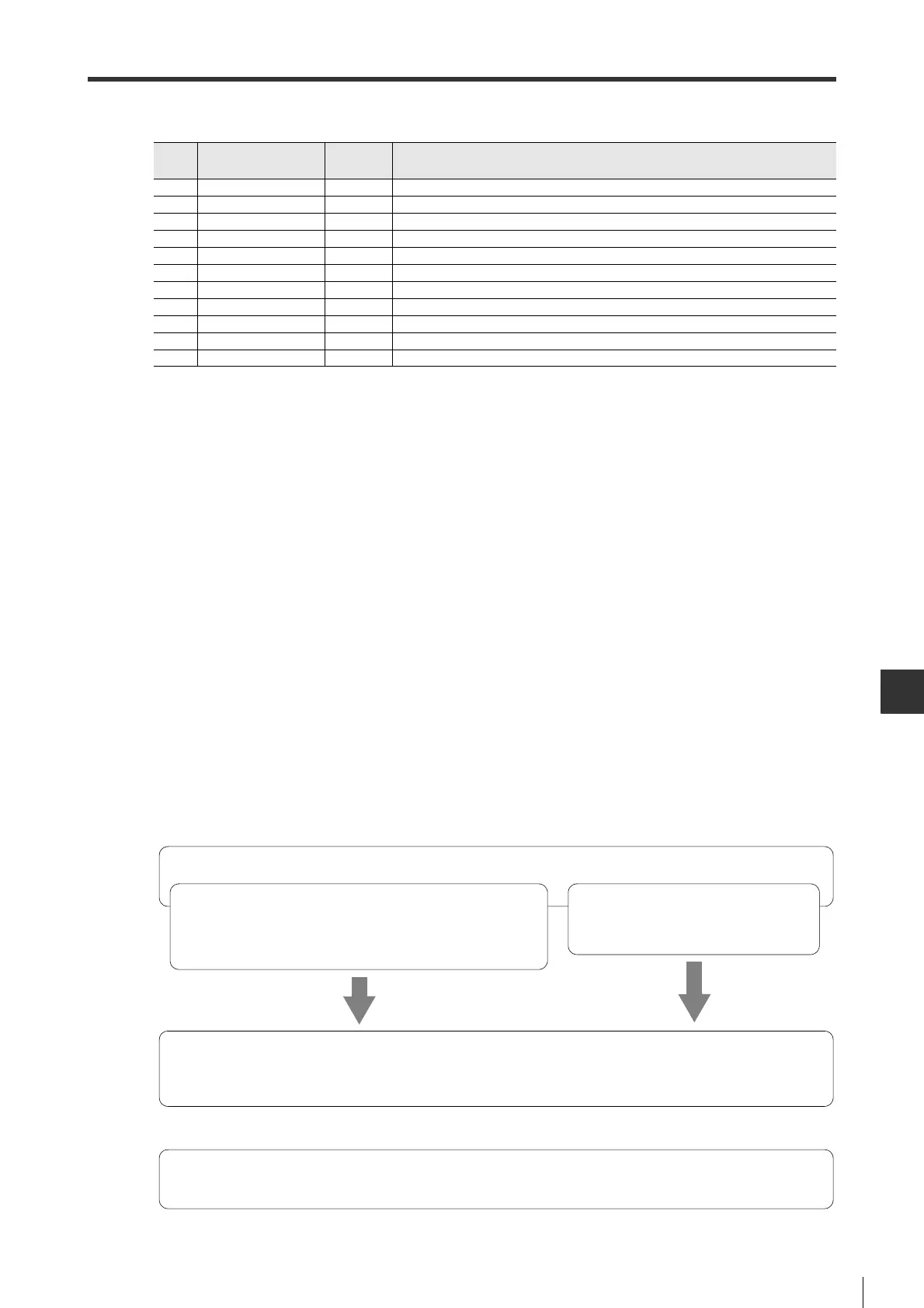
Step
s
Command
Comman
d code
Steps
1 - - Turn on the power of main circuit/control circuit.
2 DISCONNECT
*1
0FH Disconnect the previous connection.
3 CONNECT 0EH Establish connection and start watchdog timer.
4 ID_RD 03H To read the ID of servo motor.
5 PRM_RD 01H To read parameters of servo motor.
6 SENS_ON 23H
Turn on the power of encoder to capture position data.
仸2
7 SV_ON 31H Set the servo motor to servo ON status.
8
POSING丄FEED
Execute operation.
9 SV_OFF 32H Set the servo motor to servo OFF status.
10 DISCONNECT 0FH Disconnect the communication connection.
11 - - Trun off the power of main circuit/control circuit.
The limit signal (LSP/LSN) is monitored. Once limit signal is input, and the following commands are sent.
• Interpolation command (INTERPOLATE, LATCH)
The interpolation command is not changed and updating
of interpolation position is stopped. Or send HOLD/
• For other commands,
to send the HOLD command.
Check whether the stop is caused by the limit switch of servo amplifier with the DEN (send completion) signal
inSTATUS field. Or PSET (within the positioning end range) signal is monitored simultaneously to detect the
stop of motor effectively.Command in step 1 is held before DEN signal and PSET signal are ready.
Cancellation of position limiting (move backward) is executed by for example POSING or FEED command.The
command reads current position, and is executed after setting up appropriate command pulse again.
Step 1
Step 2
Step 3
 Loading...
Loading...