VA Motion Controller Programming Manual
103
to
NPN
;
3
, in order to reduce interference, the differential signal (
OA +
A +
) and (
OA-
A-
),
(
the OB +
B +
) and (
OB-
B -
) are connected with the twisted pair, the total of the housing.
4
: PrograMCreation configuration and debugging
known
In the
PC
after a successful communication with the motion controller, set up the system,
servo parameter setting is completed, the next start programming control servo motor run and stop;
the default user before programming have read " Di Shiyi Zhang motion command "
includes: 11.1 insert FB_FU_LIB motion control library , 11.
The 2 movement instruction , 11.3 motion instructions basics and . 1 . 1 . . 4 uniaxially
instructions.
(
1
) Project creation and configuration
Reference "on Qi Zhang works of creation and configuration." Follow the steps to
complete :
7 .1
create projects
7 .3
physical communication
parameters
7 . 4 IO
configuration , which will not be repeated herein.
(
2
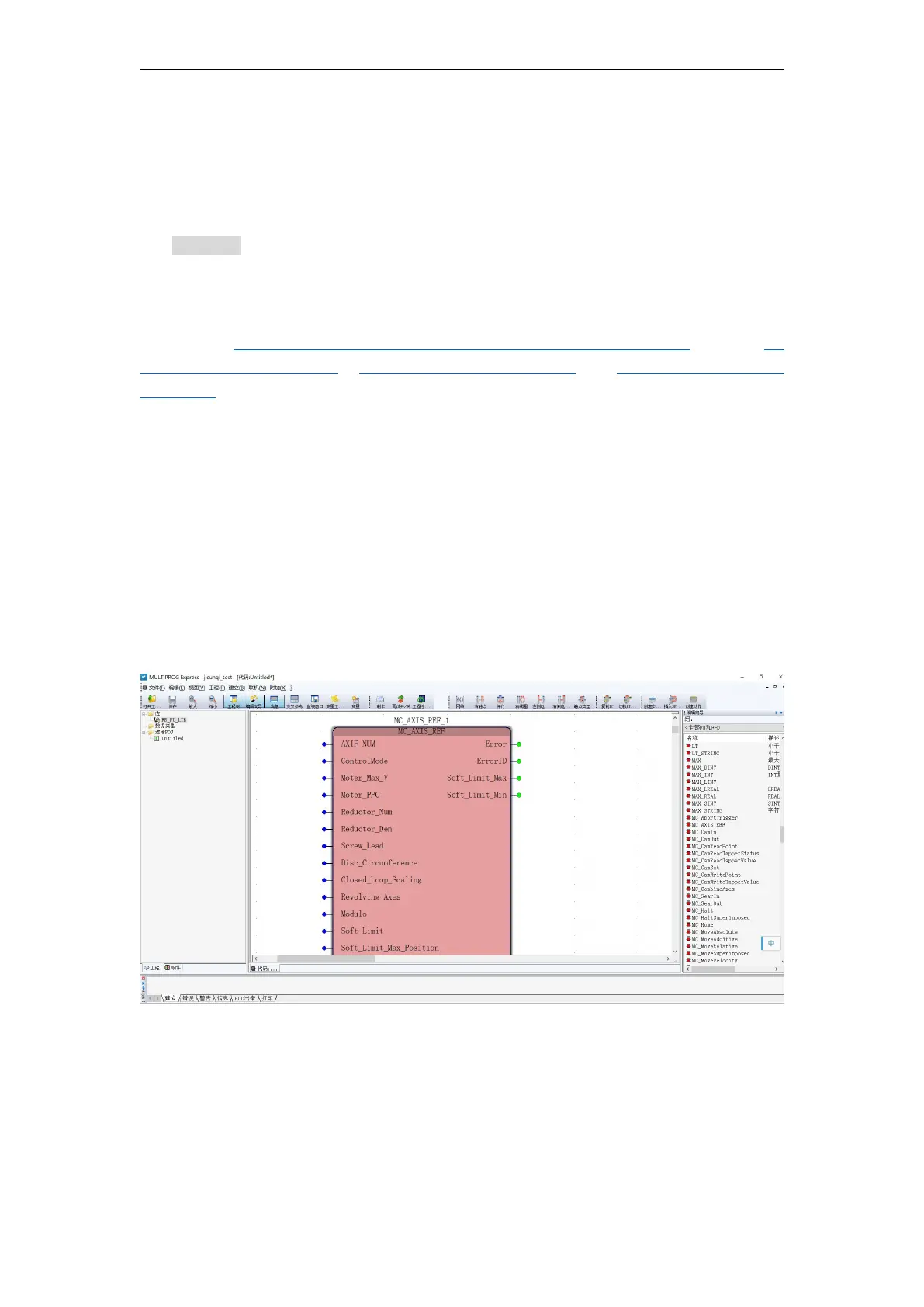
) Writing a program
Step 1: Enter the programming interface, select the “ MC _ AXIS_REF ” block in
the
FB_FU_LI
motion control library , hold down the left mouse button and drag to the
programming interface, then let go, the module's properties will pop up, you need to name the
module. Generally keep the default, click "OK" , as shown below ;
Step 2: Double-click the module input pin (blue dot), and the“Variable Properties”box will
pop up to define the variable name, data type, usage, initial value, etc. , as shown in the
figure (here the axis
AXIS0 is
useDAs the control). Axis) ;