VA Motion Controller Programming Manual
106
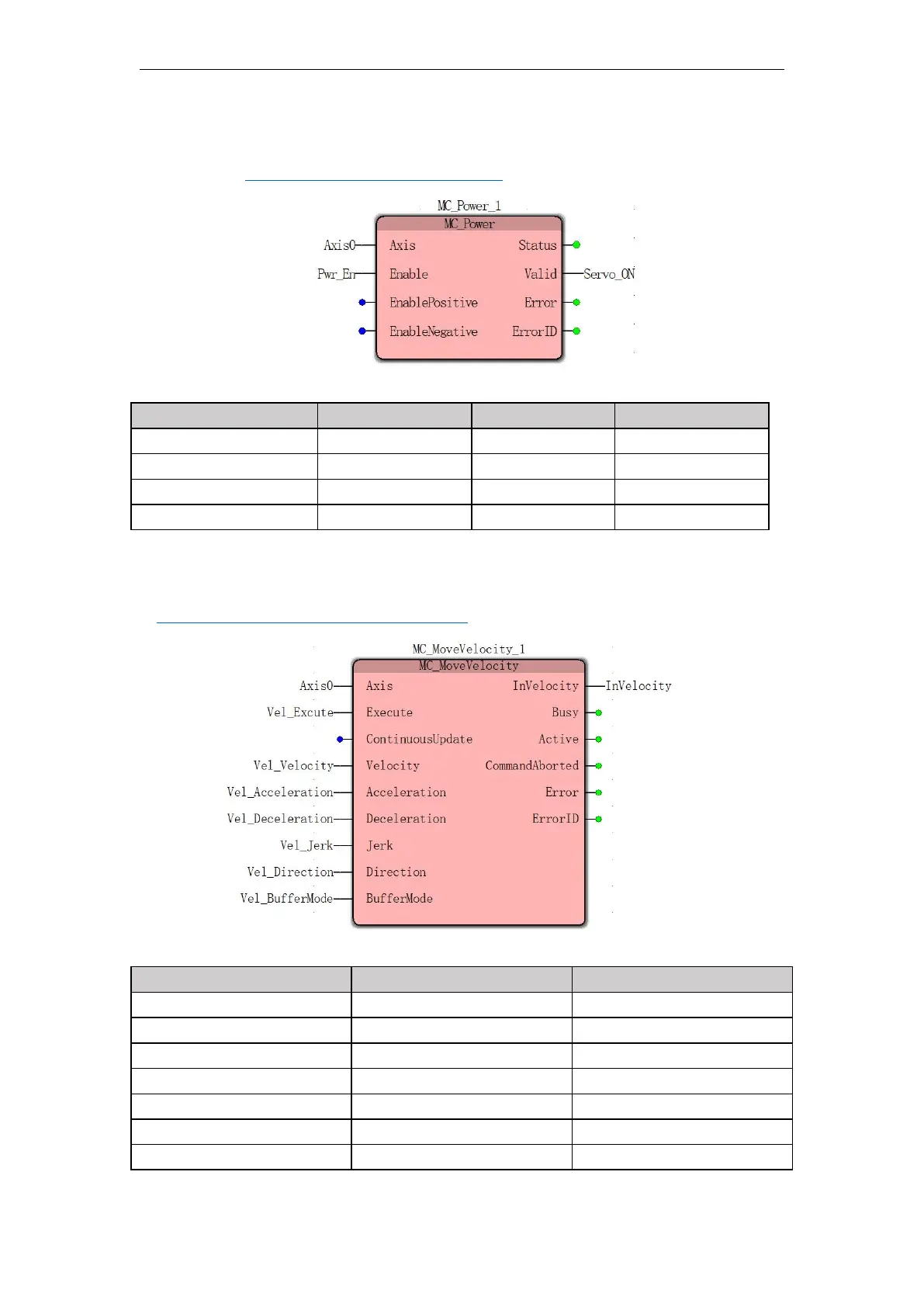
The third step: similarly add the "
MC_Power
" commanDAs follows , enable the motion
controller, and control the enable of the servo drive through
Se rv o _ON
(
I / O
address :
%QX0.0
)
output , refer to 1 1.4.1 MC_Power ( enable command ) ;
Variable name anDAttribute
The fourth step: similarly add " MC_MoveVelocity " (speed command module) , used to
control the servo motor to run at the set speed , refer
to 1 1.4. 2 MC_ MoveVelocity ( speed command ) ;
Variable name anDAttribute