VA Motion Controller Programming Manual
107
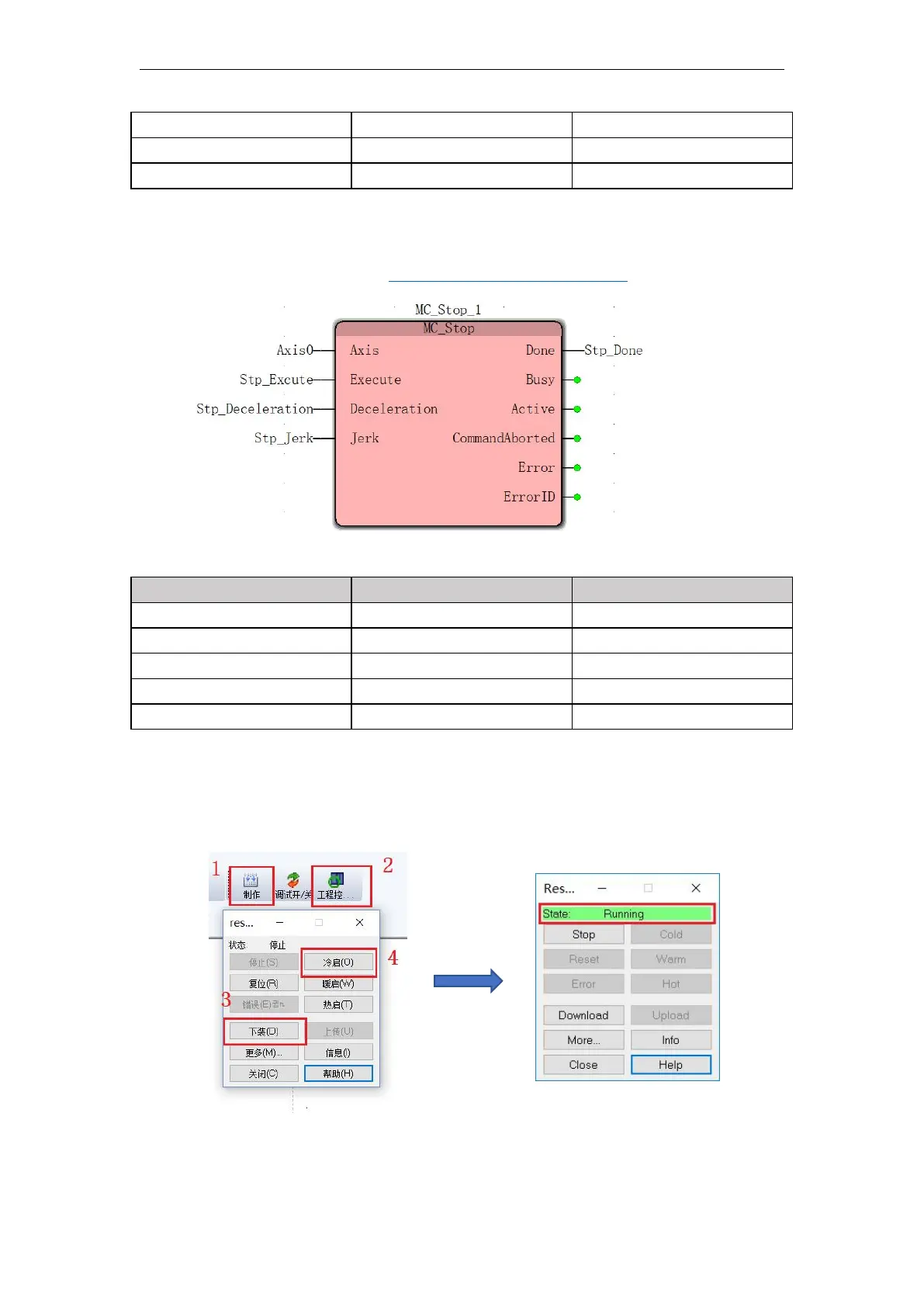
Step 5 : Add “ MC_Stop ” (stop command) . After the module is executed, the servo motor
starts to decelerate and stop . Refer to 1 1.4.10 MC_Stop ( stop command ) ;
Variable name anDAttribute
At this point, the programming is complete.
Step 6: Make a bottom-loading project. In the toolbar click on the make , the confirmation
process is correct, click download programs, then click on cold start , after a cold start is
successful, the status is displayeDAs a running state .