VA Motion Controller Programming Manual
114
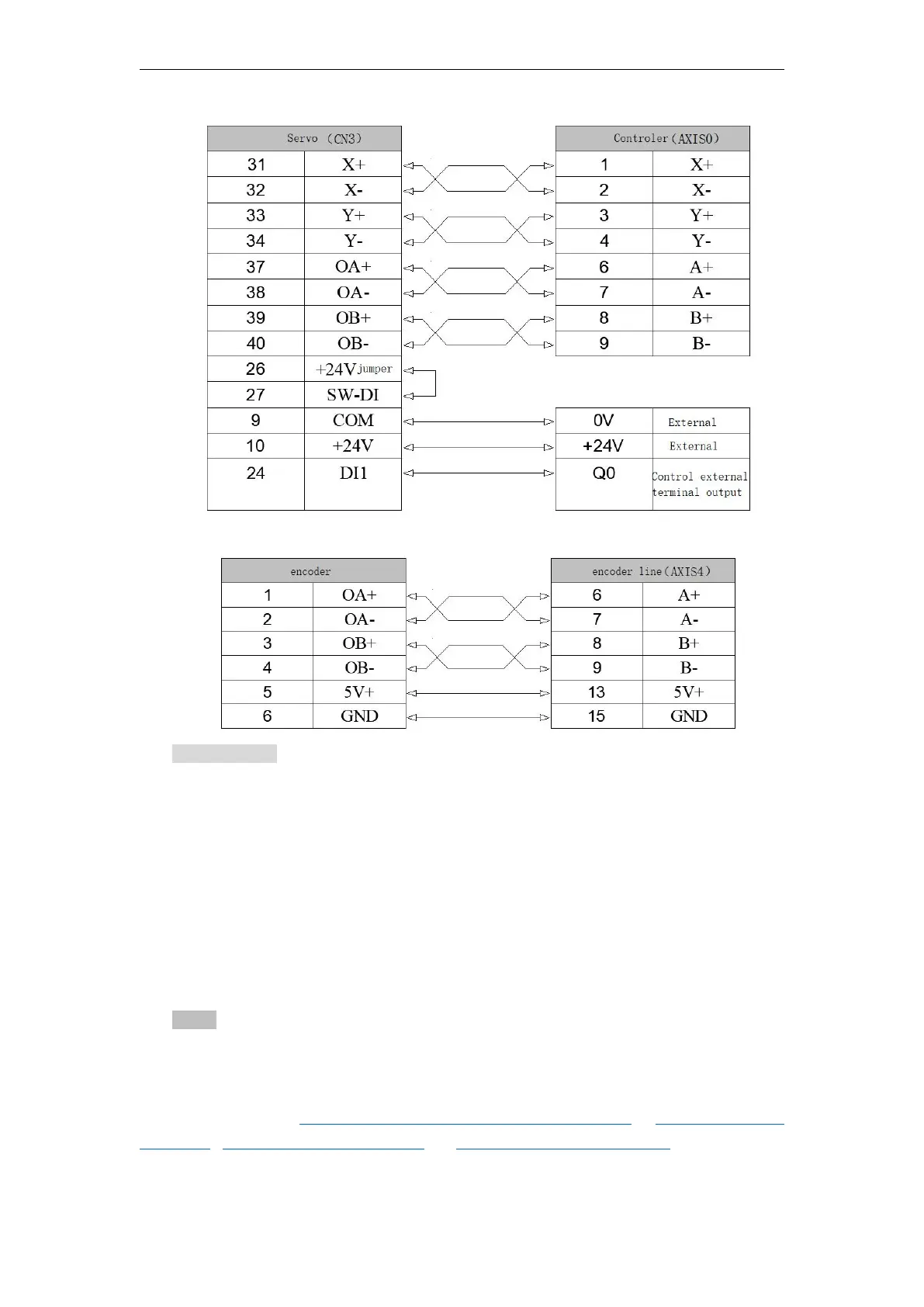
Encoder cable connection
Description :
1.
In order to control the servo driver enable by controlling the output of the motion
controller
Q 0
, it is necessary to supply AD
C24V
power supply to the servo driver to supply power
to the servo
DI
;
2
,
DIx
signal type (
NPN/PNP
) selection :
SW-DI
(
27
feet ) and
+24V
(
26
feet) are shorted
to
NPN
;
3.
In order to reduce the interference, the differential signals (
OA+
A+
) and (
OA-
A-
),
(
OB+
B +
) and (
OB-
B -
) and
XY
pulse signals are respectively connected by twisted pairs,
and the outer casing is grounded. .
4
: PrograMCreation and debugging
Notice
After the above
PC
and the motion controller communicate successfully, the system is set up,
the servo parameter setting is completed, the next step is to start programming to control the servo
motor to run and stop; before the programming, the default user has read the "Chapter 11 Motion
Command" including: 11.1 insert FB_FU_LIB motion control library , 11. The 2 motion
commands , 11.3 motion instructions basics and . 1 . 1 . . 4 uniaxially instructions .