VA Motion Controller Programming Manual
117
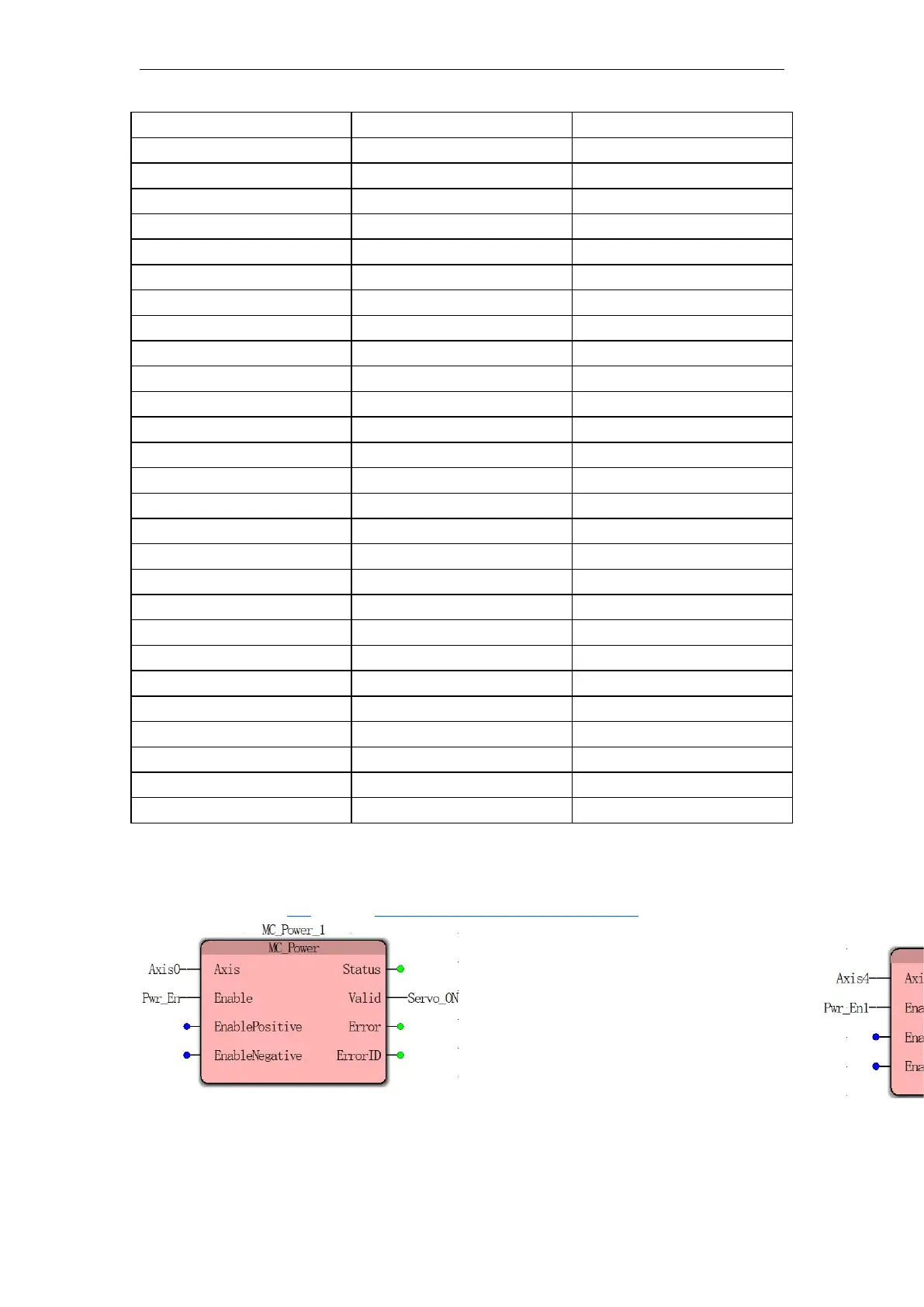
Step3: Add Similarly two "
the MC_Power
" instruction as to enable the motion controller,
while servo axis (
the AXIS 0
) by
Se RV O _ON, the
( the I
/ O
Address:
% QX0.0
) output control
causes the servo drive Yes , refer to 1 1.4.1 MC_Power ( Enable Command ) ;
Variable name anDAttribute