VA Motion Controller Programming Manual
120
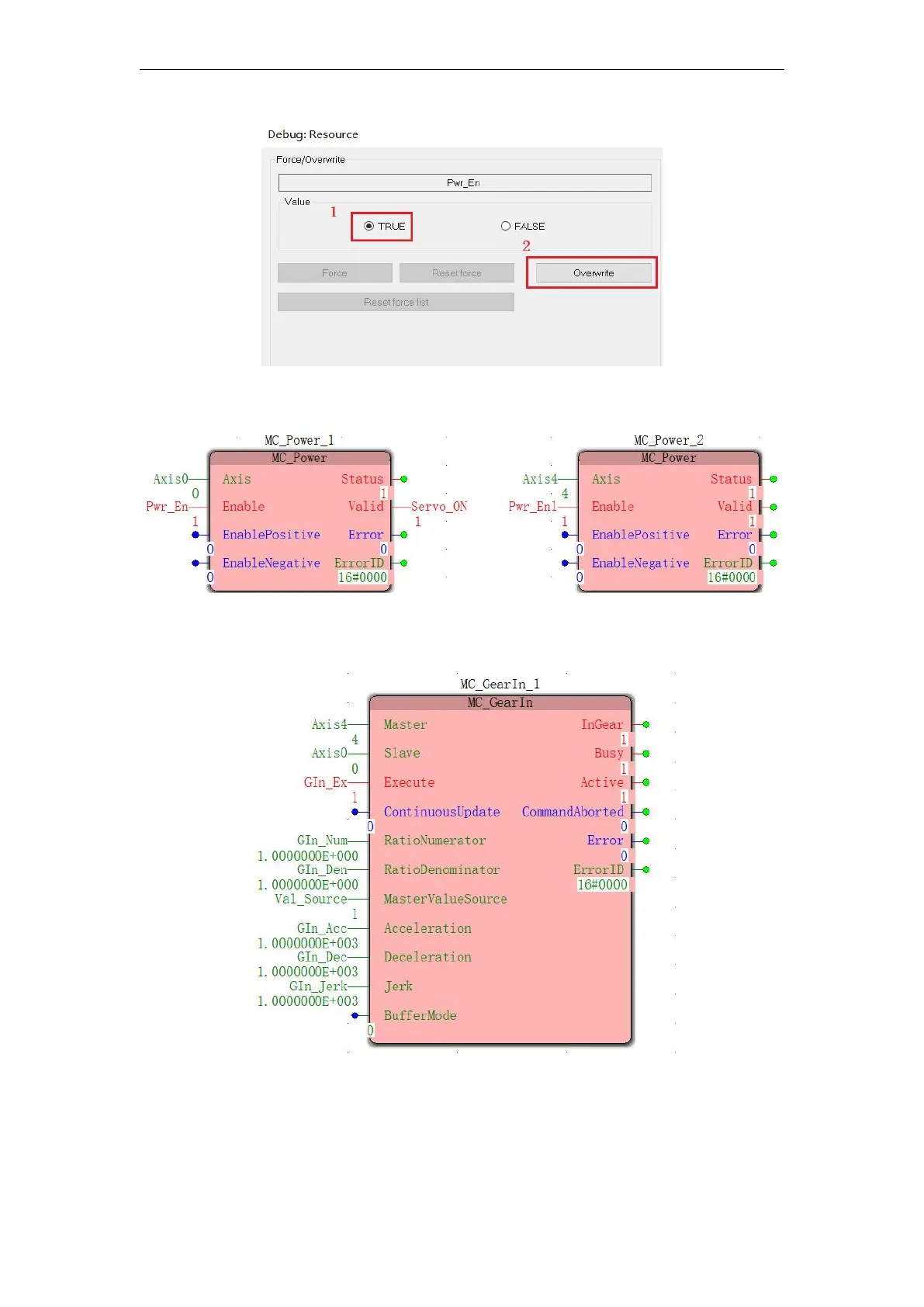
WheNS
ervo _ON, the
a
False
becomes
Ture
, the motion controller describeDAxes is enabled
successful, and by
Q 0
output while allowing the servo enabled;
Debug
2
: Similarly, double-click
G In_Ex
to change its value from
False
to
True
, so
that controller
A XIS0
anDA
XIS 4
establish electronic gear relationship,
AXIS 4
is the main
axis,
AXIS 0
is the slave axis, and the gear ratio is
1 :1
;
Commissioning
3
: At this point, turn the spindle (encoder) and the slave axis (servo axis)
will follow the spindle in accordance with the
1: 1
electronic gear ratio.