VA Motion Controller Programming Manual
122
Wei Keda
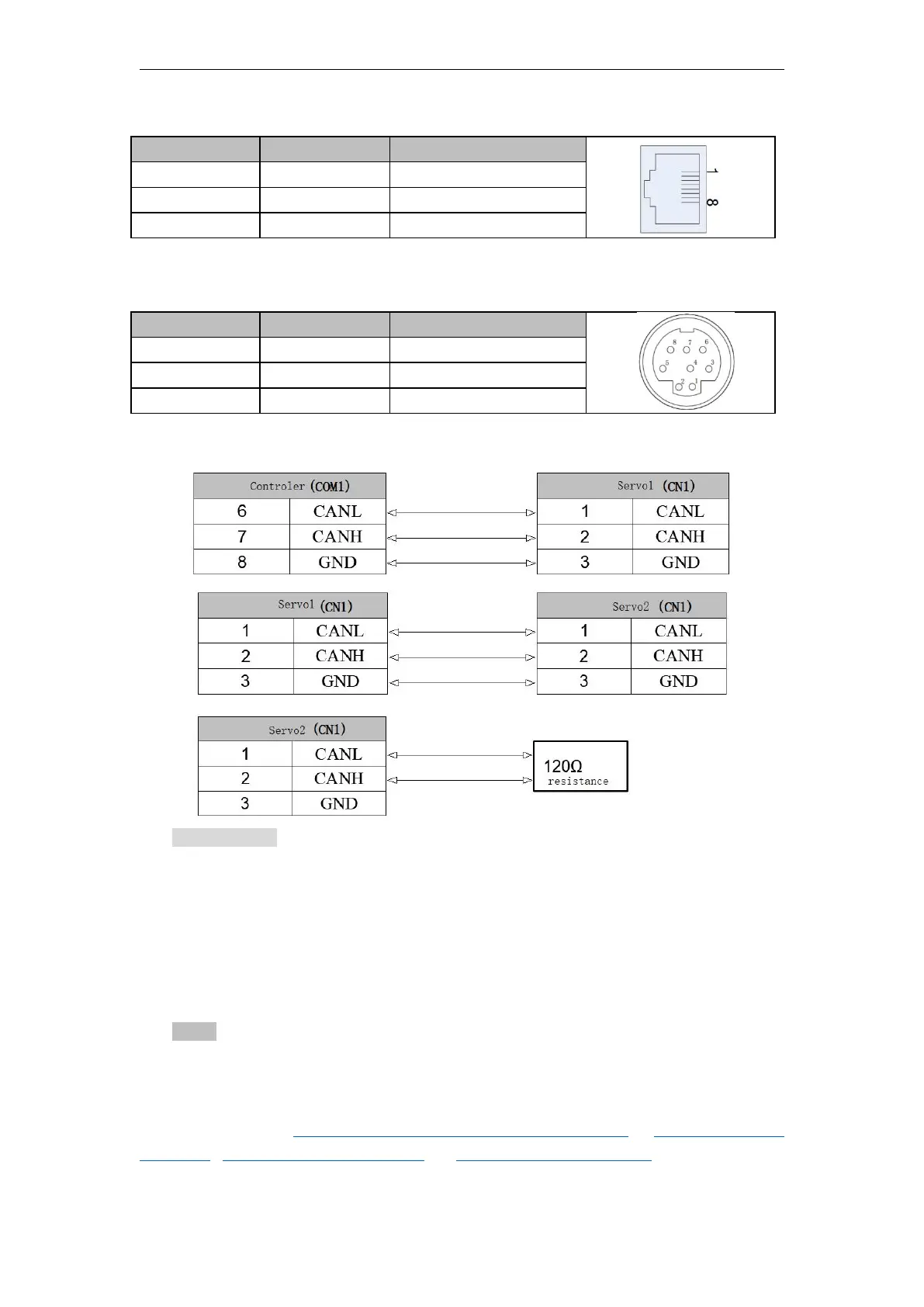
the CAN Open
type servo drive is
the CN . 1
part of the pin definitions
Wikoda motion controller
COM 1
port part pin definition
CANopen network communication line connection
Description :
. 1 , The CANopen next communication mode, the program uses the MC _Power (Enable
command ) to make the same time to the module, via the communication will enable the servo
driver, so no additional access points to control the servo drive output enable ;
2 , In order to enhance CANopeNStability of communication, CANopen terminal needs to
access the network bus 120 [Omega] terminal resistor.
4 : PrograMCreation and debugging
Notice
After the above PC and the motion controller communicate successfully, the system is set up,
the servo parameter setting is completed, the next step is to start programming to control the servo
motor to run and stop; before the programming, the default user has read "Chapter 11 Motion
Command" includes: 11.1 insert FB_FU_LIB motion control library , 11. The 2 motion
commands , 11.3 motion instructions basics and . 1 . 1 . . 4 uniaxial instruction . "