VA Motion Controller Programming Manual
123
(
1
) Project creation and configuration
For the convenience of use, our company has equipped the user with a template
project for
CANopen
communication configuration. Users can go to the official website to
downloaDAnd directly program on the basis of the template project. ( The template default
configuration of a shaft, can be configured up
. 1 . 6
axes, may be addeDAs required in the
configuration template )
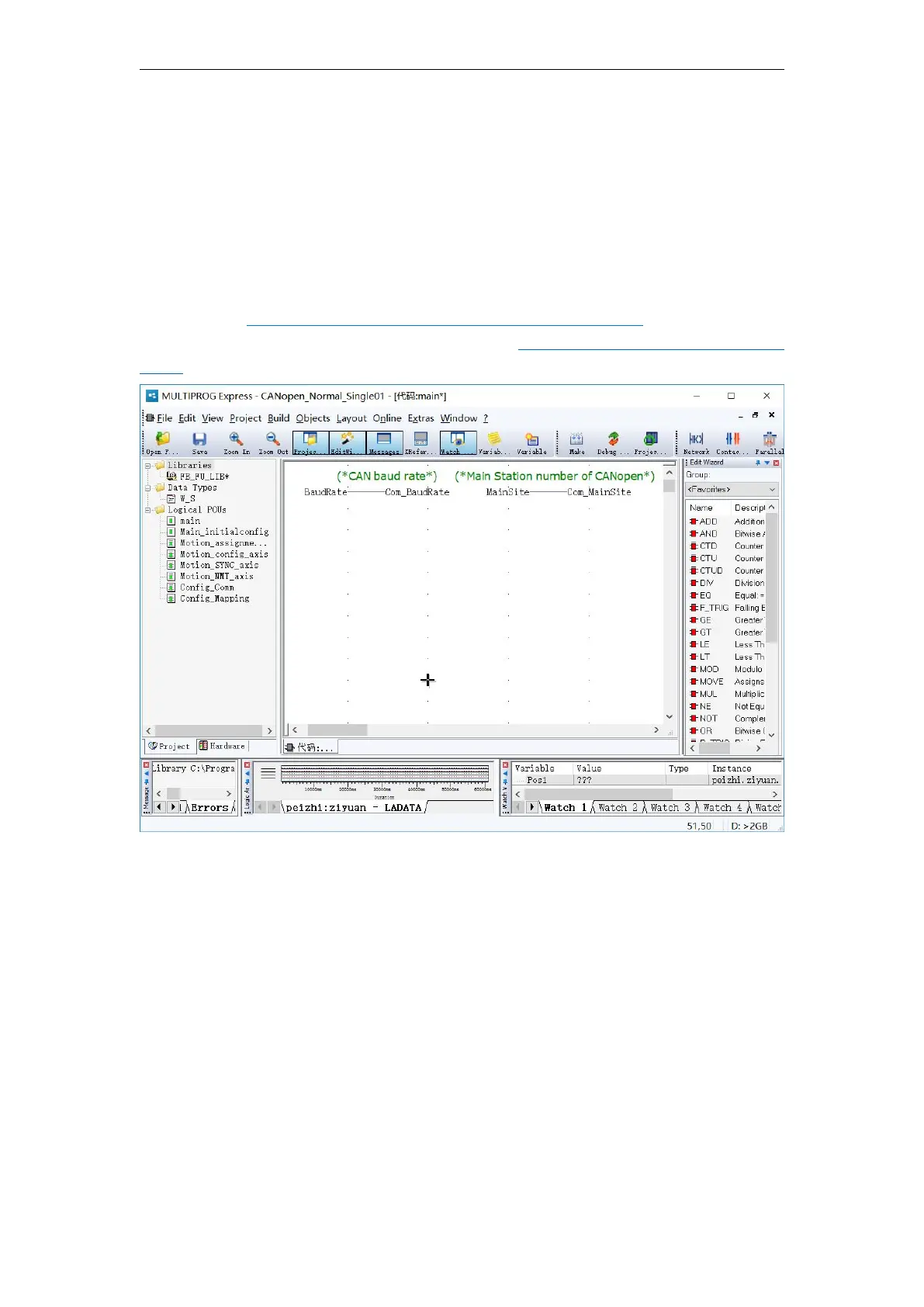
Once you have downloaded the template, extract the open, in the following figure ,
the reference to Chapter VII of the creation and configuration of the project to complete the
PC
to
communicate with the motion controller, and reference 11.1 insert FB_FU_LIB motion control
library complete adding a library, which will not be repeated herein .
Note: The template default
CANopen
master station number is
1 8
and the
CAN
bus baud rate
is
8 00
(corresponding to the
CAN
bus baud rate set by the servo driver
P 08.40
), which can be
modified by modifying the initial value of the
BaudRate
.
(
2
) node configuration
Step 1: Since the template configures one axis by default (node number is 1 ), and two
axes are used in this case, we need to manually adDAnother axis in the configuration template
(node number is set to 2 ). Double-click " Main _initialconfig " under "Logical POU " in the
project tree to open the configuration flow program of
CANopen
communication (you can close
the window management button in the upper right corner when you need to close), as shown
below.
The maiNSteps of the configuration can be seen in the figure: master-slave node reset
(
R estnode
), master-slave node enters pre-operation mode (
Motion 402 _ assignment
),
configures master-slave node synchronization cycle and master-slave node process data