VA Motion Controller Programming Manual
300
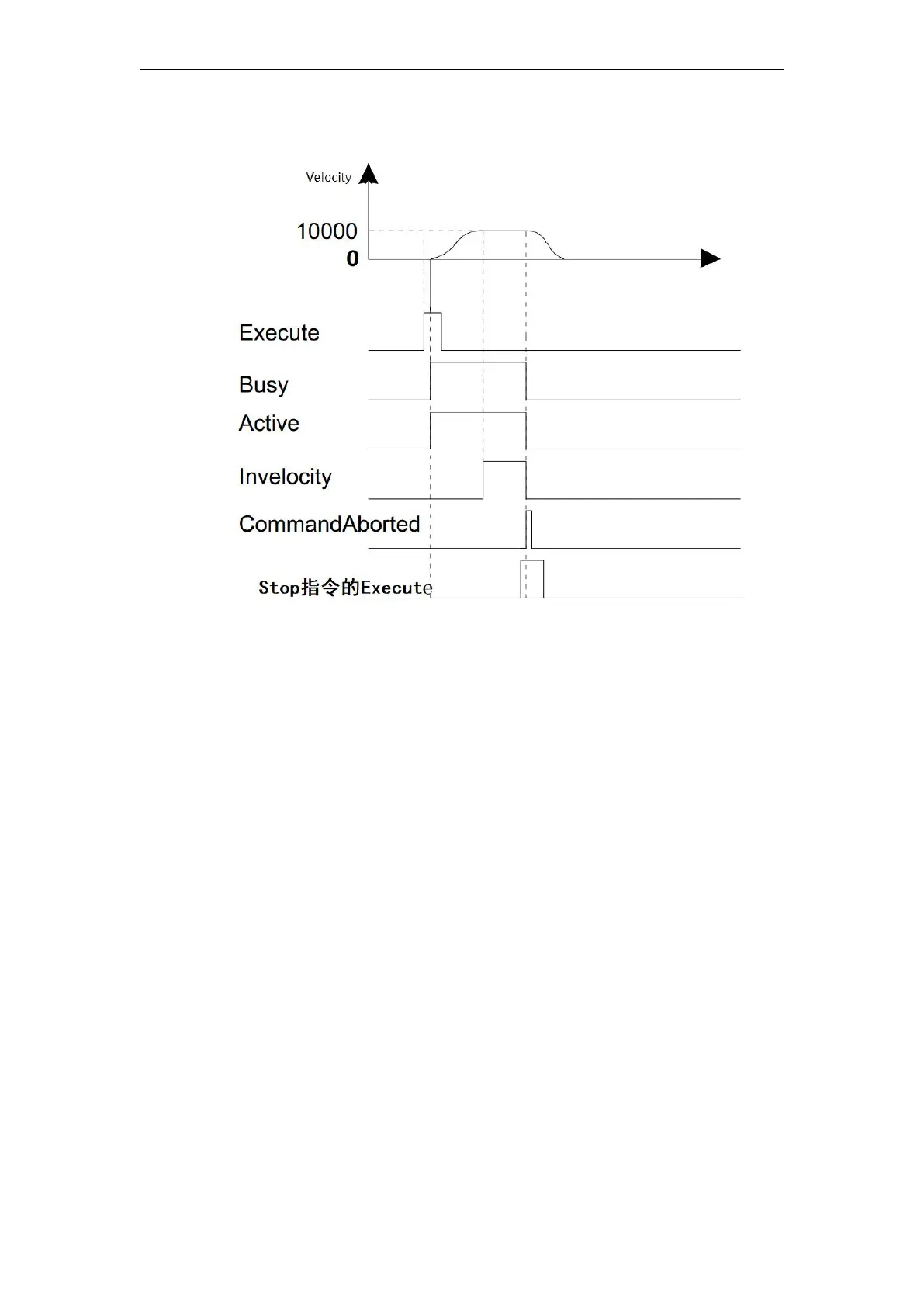
2、Timing and motion profiles of FIG.
When Vel1_Ex a FALSE to TRUE, Vel1_Bsy, Vel_Act simultaneously become
TRUE, starts instruction execution speed; when the speed reaches, Vel1_Invel becomes
TRUE, and at the same time Vel1_Bsy Vel1_Act remains to TRUE.
When Stop_Ex1 a FALSE to TRUE, after a period, CommandAborted a FALSE to
TRUE (in this case, if Vel1_Ex FALSE, then after a period CommandAborted becomes
FALSE), while, Busy and Active becomes FALSE.