VA Motion Controller Programming Manual
319
When the positioning is completed, Done becomes TRUE, and the Busy Active becomes FALSE,
it is the Execute TRUE to FALSE after a period, Done becomes FALSE.
Case 2: When the Execute is TRUE, the instruction is interrupted after the other instructions,
CommandAborted becomes TRUE, and the Busy Active becomes FALSE; Execute when a TRUE
to FALSE, after a period CommandAborted becomes FALSE.
Case 3: After during instruction execution, Execute a TRUE to FALSE, when the instructions
are executed, Done becomes TRUE, and the Busy Active becomes FALSE, and after a period,
Done becomes FALSE.
Function Description
This instruction is used to set speed control shaft, and a deceleration jerk to move
relative to the target zero position.
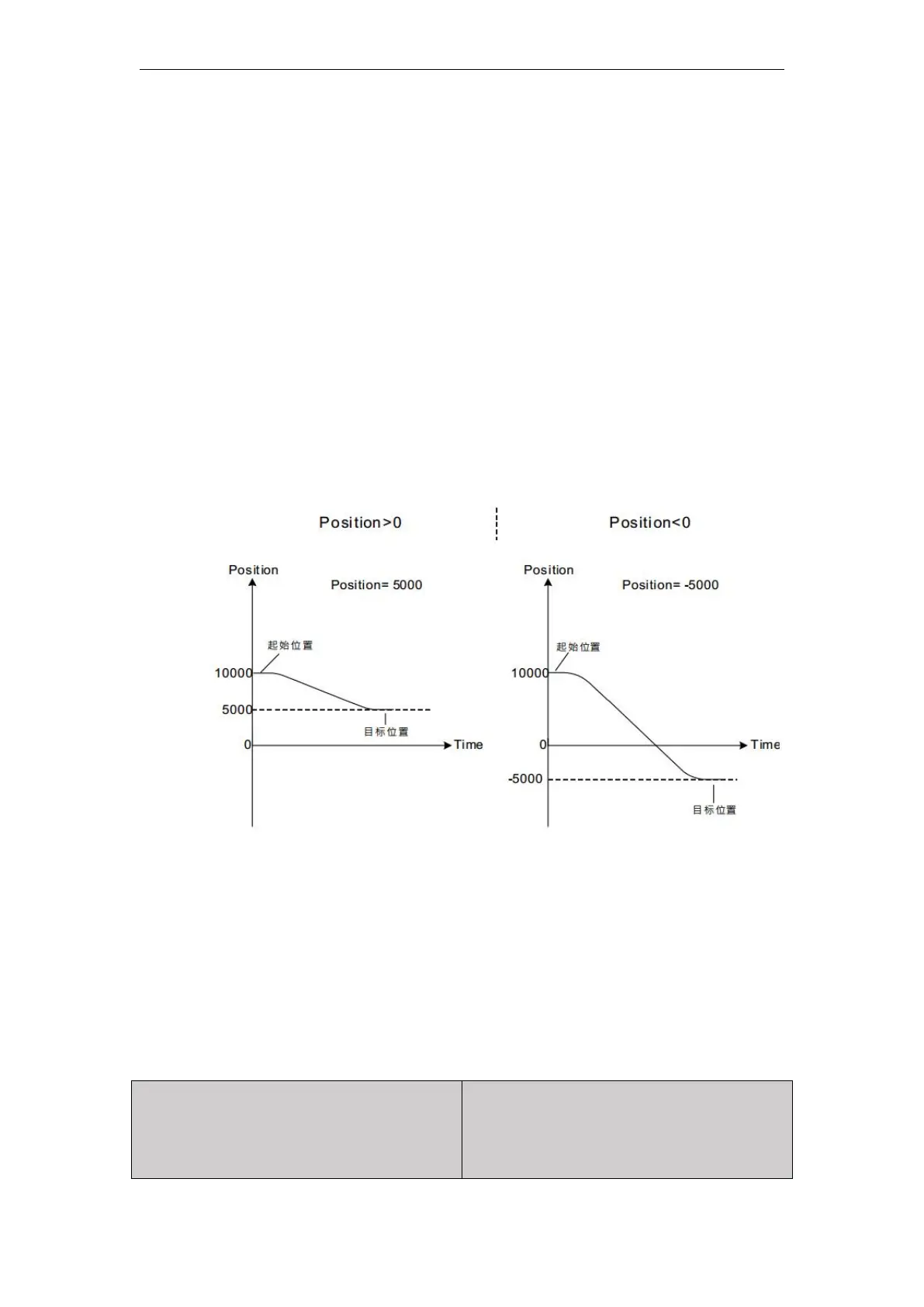
Axis position command execution starting absolute displacement 10,000, when
Position> 0 (5000), the axis will reverse movement, the target position 5000, shown below as
left; when Position <0 (-5000), the reaction shaft turn, the target position -5000, as shown in
the lower right in FIG.
note:Once this instruction is terminated other instructions during operation,
the remaining distance is not completed will be discarded, the new instruction
execution functions.
Direction
Direction parameters take effect only when the shaft is a rotating shaft, its different values,
the direction of movement of the axis shown in the following table examples (modulo 360):
Direction: 1 (positive direction)
Location: 315
Destination: 90
Movement angle: 135 °
Direction: 3 (reverse orientation)
Location: 315
Destination: 90
Movement angle: 225 °