VA Motion Controller Programming Manual
341
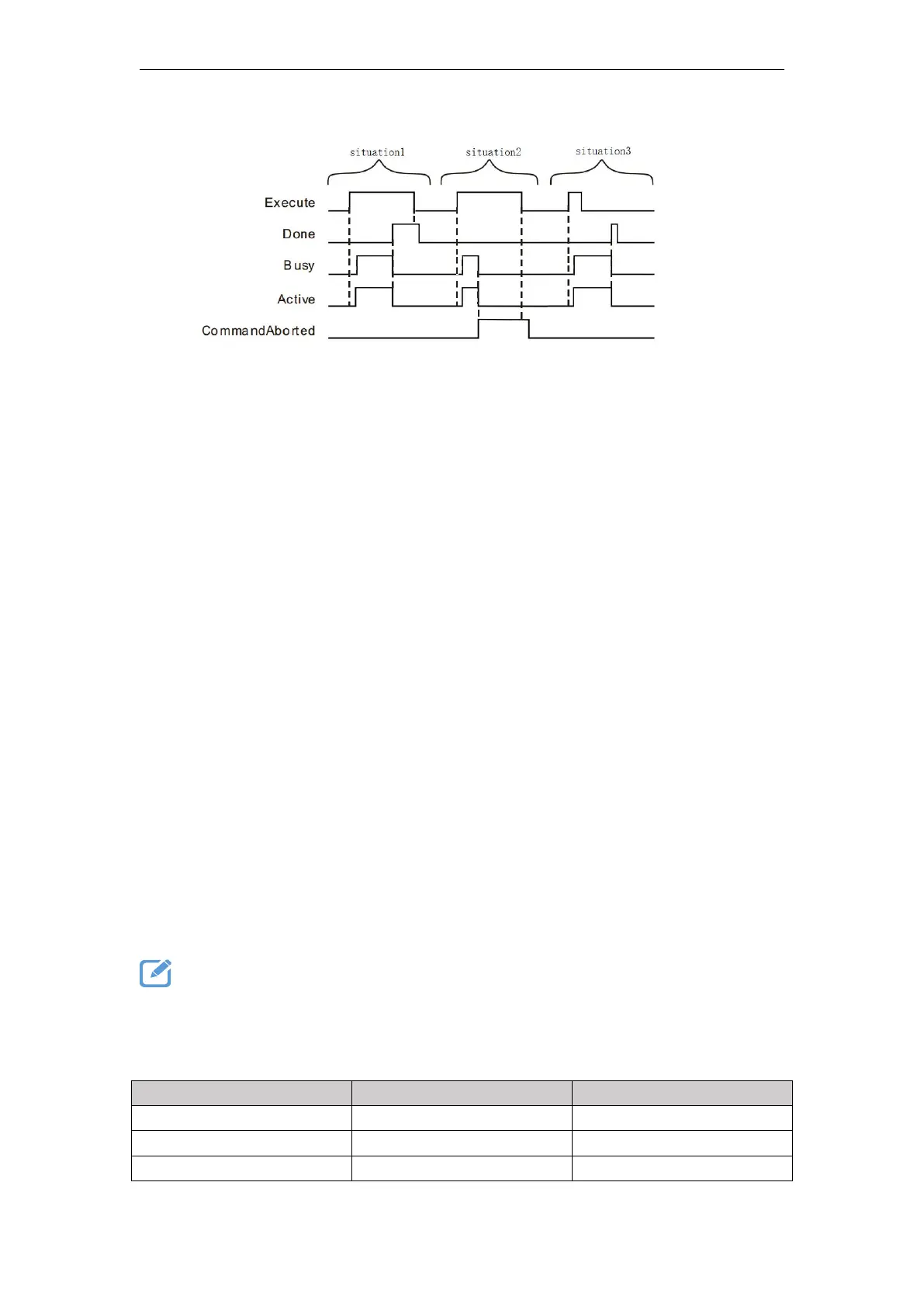
Case 1:When the Execute FALSE to TRUE, after a period Buys Active and simultaneously
become TRUE;
When the positioning is completed, Done becomes TRUE, and the Busy Active becomes
FALSE, it is the Execute TRUE to FALSE after a period, Done becomes FALSE.
Case 2: When the Execute is TRUE, the instruction is interrupted after the other instructions,
CommandAborted becomes TRUE, and the Busy Active becomes FALSE; Execute when a
TRUE to FALSE, after a period CommandAborted becomes FALSE.
Case 3: In the course of instruction execution, after the Execute TRUE to FALSE, when the
positioning is completed, the Done becomes TRUE, and the Busy Active becomes FALSE,
and after a period, the Done becomes FALSE.
Function Description
● This instruction according to the selected homing mode, and the home switch to forward or
reverse limit switchMotion ControllerofDigitalThe entry point to achieve homing function.
● It provided a two-stage real axis speed mode and OPR OPR axis parameters in the software
section. Describe homing mode, see Appendix A.
● This instruction only when the shaft is in a state StandStill may perform, when executed in
other states, this command being given.
● Position parameter defines the return to the origin position offset relative to the servo zero
position.
Program Example
Homing select the appropriate mode and the photoelectric switch mechanism positions when
Home_Ex from FALSE becomes TRUE, the motion controller controls the operation of the servo
motor, the mechanical drive mechanism back to the origin position A.
1、 Variables and procedures