VA Motion Controller Programming Manual
370
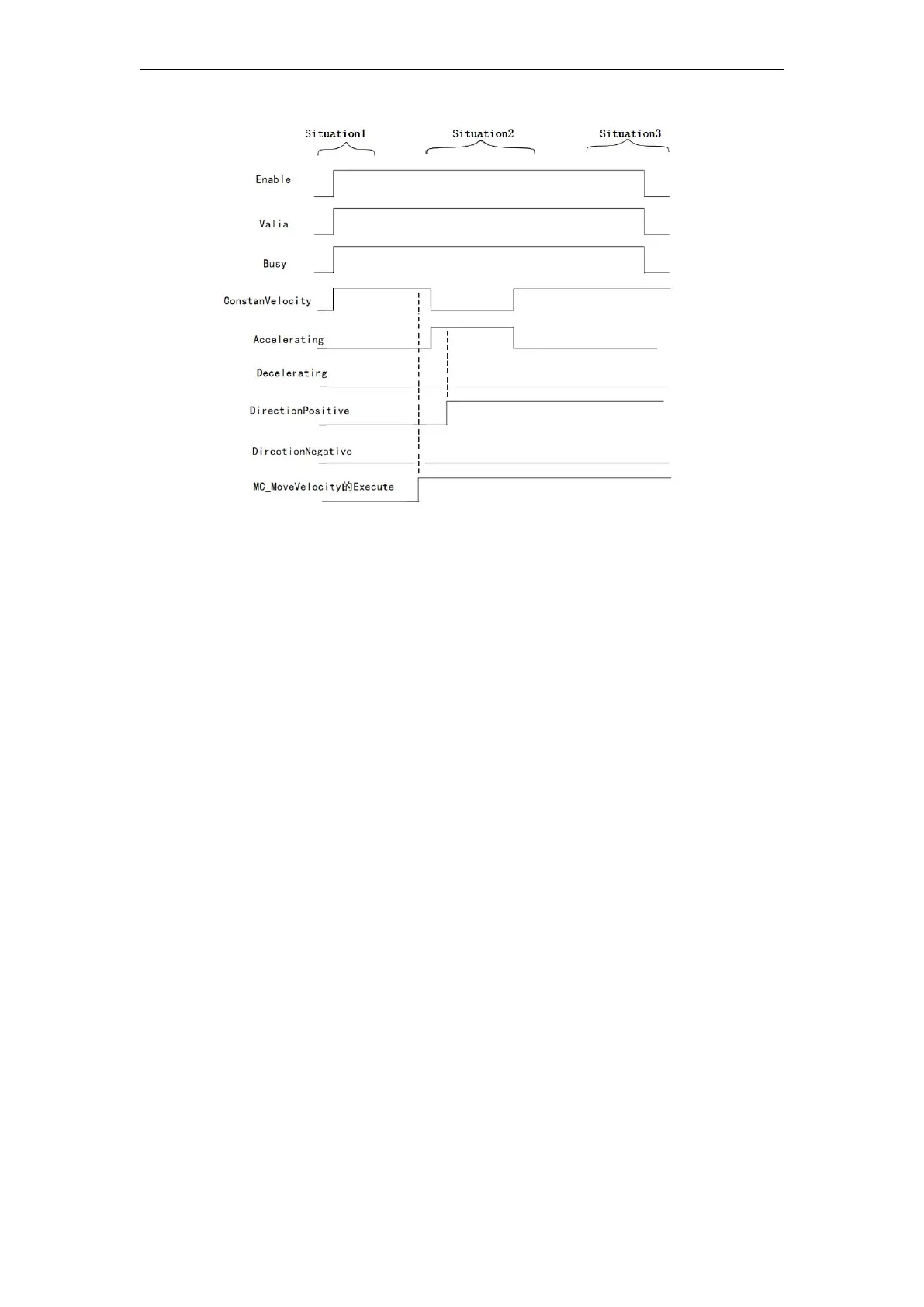
Case 1: In the controlled axis is Standstill state, when the Enable from FALSE to TRUE, and
Busy vaild simultaneously become TRUE, ConstantVelocity, Accelerating, Decelerating,
DirectionPositive, according to the output pin axis DirectionNegative state to TRUE or FALSE.
Case 2: the instruction execution speed, the controlled-axis accelerometer, Accelerating
output is TRUE, ConstantVelocity output becomes FALSE, when the current position of the
controlled axis is increased DirectionPositive output to TRUE.
Case 3: When the Enable TRUE to FALSE, Vaild Busy and simultaneously become FALSE,
ConstantVelocity, Accelerating, Decelerating, DirectionPositive, DirectionNegative output pin
state remains unchanged when the Enable TRUE.
Function Description
This instruction is used to read the current state of motion of the servo axis. Servo axis
motion comprises: uniform motion, acceleration or deceleration motion, and the forward or
reverse.