89Service Manual – CS7010™ 22 - Steering System
Steering Position Sensor & TFD
The operator’s steering wheel is connected to a rotary position
sensor with an integral Torque Feedback Device (TFD). Even
though this is a single device, the two functions are distinct
and semi-unrelated. The position sensor is based on rotary
hall effect sensors internally, but the output to the steering
controller is a 2-channel PWM signal representation of
absolute position.
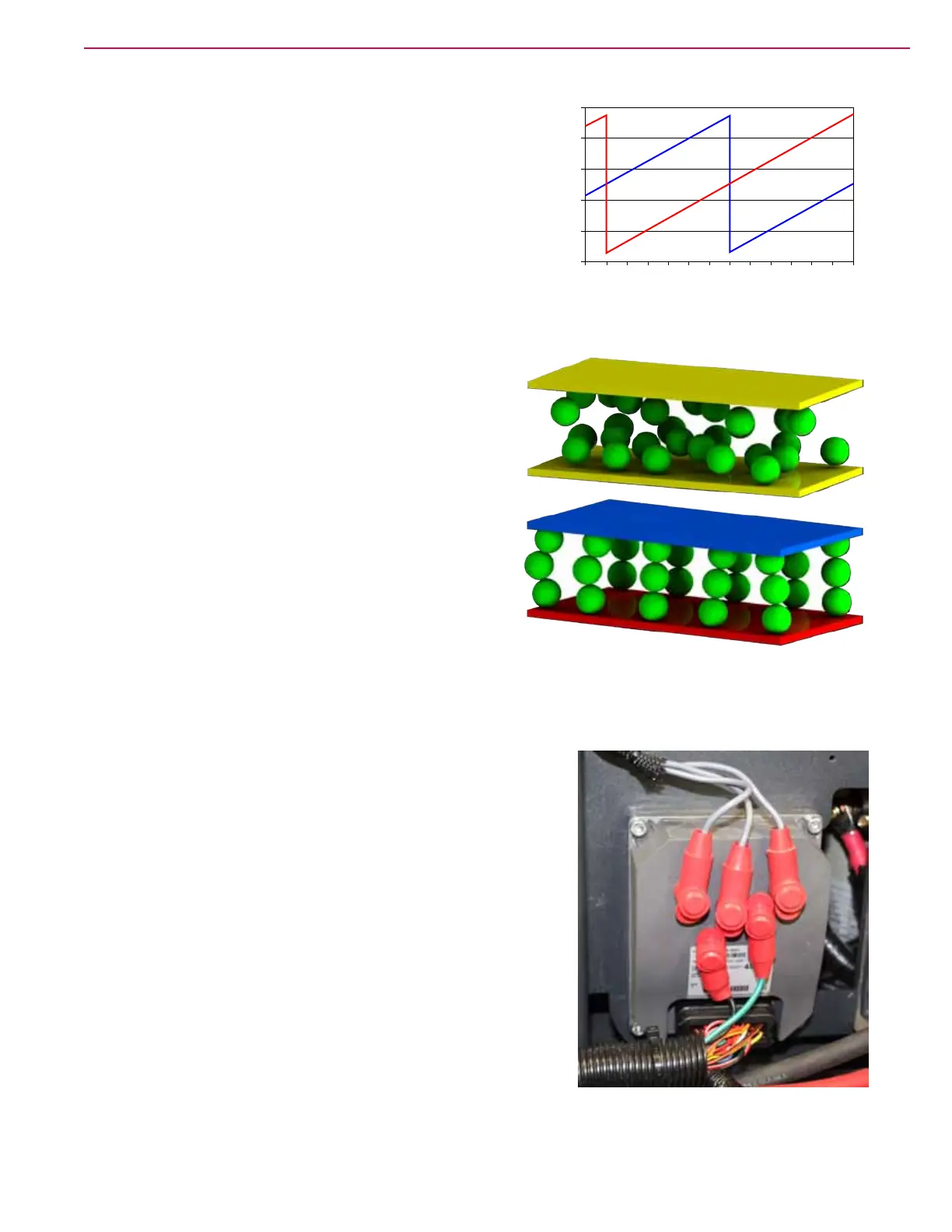
As the steering wheel is rotated, the two PWM channels
ramp their voltages up or down, and the two channels are 180
degrees apart. The steering controller uses this information,
in conjunction with the right and left limit switches to
synchronize steering wheel and drive wheel position.
The Torque Feedback Device (TFD) provides a
mechanical feel to the steering wheel movement
by resisting rotation. But the TFD isn’t just
passive friction. It is an active device which uses
a MagnetoRheological Fluid (MR Fluid) that is
electrically controlled. MR Fluid is a suspension
of small particles that align in the presence of a
magnetic eld. This alignment alters the uid’s
effective viscosity to the point that becomes semi-
rigid with an elastic-like sheer strength.
When the MR Fluid is placed between two
moving surfaces, it resists movement between
those surfaces, depending on the strength of the
magnetic eld.
The steering controller sends a PWM signal to the TFD to control the amount of resistive torque the TFD
exhibits. Normally this remains a constant resistance, however, when the steering controller detects that the
drive has reached either the right or left limit switches, it increases the PWM rate, increasing the magnetic
eld, to give the steering wheel the feel of a limit stop.
Steering Controller
The steering controller is semi-autonomous, although it does still
communicate with the Main Machine Controller (via the CAN Bus),
and also noties the drive controller that the steering system is
ready for travel. The steering controller receives input commands
from the operator’s steering wheel, and outputs motor control to
the steering actuator motor. The steering controller also monitors
the steering limit switches to prevent the steering assembly from
turning too far left or right.
As with the other controllers in the system, the steering controller
receives its logic power from the keyswitch (KSI) to activate the
controller. The controller then activates its own primary power by
energizing the K5 relay coil by switching J6-13 to Bat-. This relay
provides the main high-power energy to the controller.
The steering controller is different from most other motor
controllers in the system, in that it produces an electronically
generated AC sinewave output, compared to the more common DC squarewave of other drives. This output
is still PWM modulated to control the amount of power, however.
100
80
60
40
20
0
0
27018090 360
Angle (degrees)
PWM Duty Cycle %
Channel x Channel y
No Magnetic
Field
With
Magnetic
Field