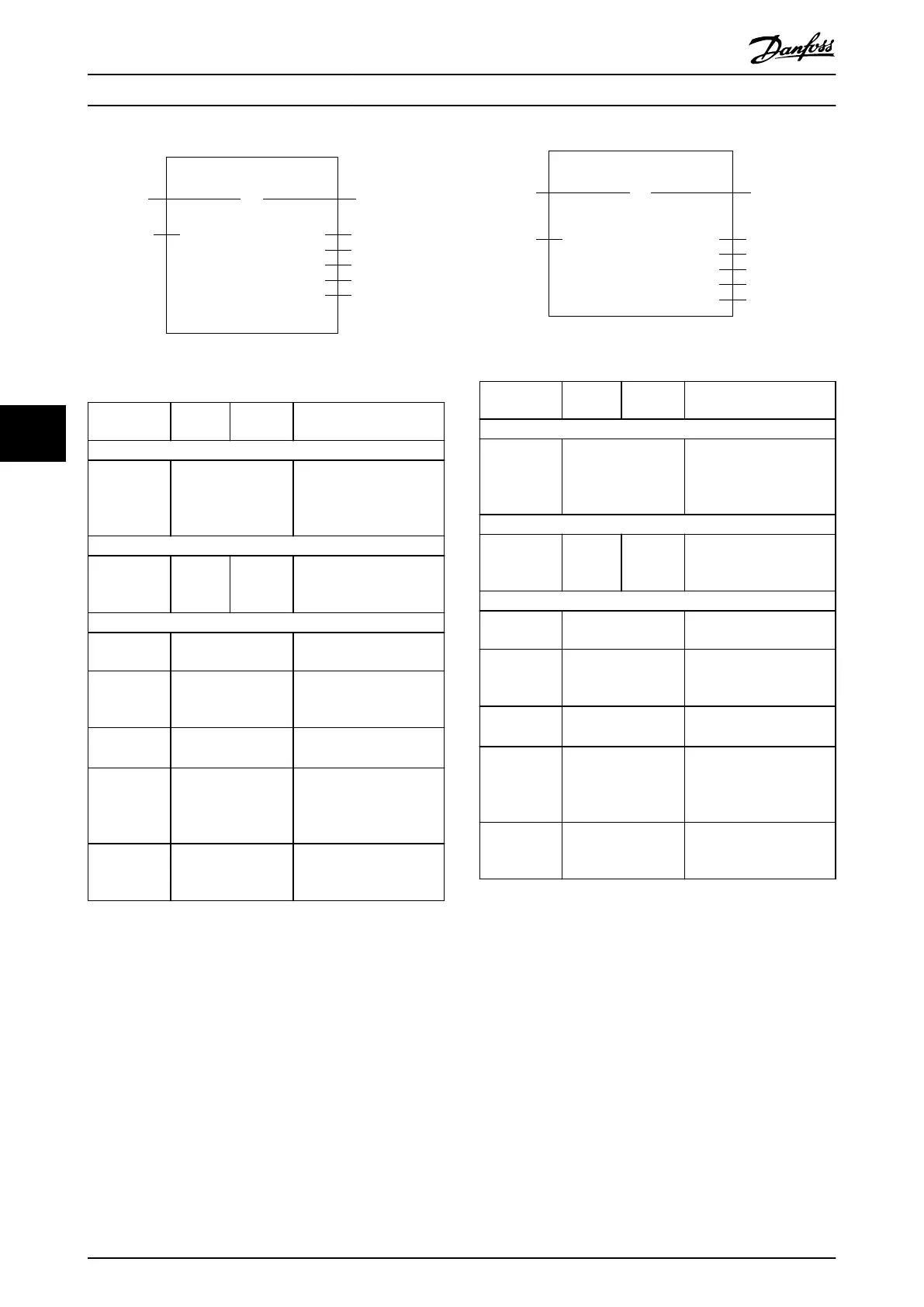
MC_ReadActualVelocity_ISD51x
Axis
EnableBOOL
AXIS_REF_-
ISD51x
BOOLValid
BOOLBusy
BOOL
DD_ERROR_ISD51x
ErrorInfo
DINT
Velocity
Error
130BE291.10
Illustration 6.35 MC_ReadActualVelocity_ISD51x
Variable
name
Data
type
Default
value
Description
VAR_IN_OUT
Axis AXIS_REF_ISD51x Reference to the axis.
See
chapter 6.5.4.1 AXIS_REF_IS
D51x.
VAR_INPUT
Enable BOOL FALSE Get the value of the
parameter continuously
while enabled.
VAR_OUTPUT
Valid BOOL The function block has a
valid output.
Busy BOOL The function block is not
nished and new output
values are to be expected.
Error BOOL An error has occurred
within the function block.
ErrorInfo DD_ERROR_ISD51x Error identication and
instance identier.
See chapter 6.5.2.3 Error
Indication.
Velocity DINT The value of the actual
velocity [user-dened
velocity unit].
Table 6.13 MC_ReadActualVelocity_ISD51x
6.5.4.13 MC_ReadActualTorque_ISD51x
This function block provides the value of the actual torque
if Enable is set (see chapter 7.12.5 Parameter 52-31: Torque
Actual Value (0x6077)). Valid is TRUE when the data-output
Torque is valid. If Enable is reset, the data loses its validity,
all outputs are reset, and new data is available.
The output Torque is a signed value.
The output data is available immediately.
MC_ReadActualTorque_ISD51x
Axis
EnableBOOL
AXIS_REF_-
ISD51x
BOOLValid
BOOLBusy
BOOL
DD_ERROR_ISD51x
ErrorInfo
INT
Torque
Error
Illustration 6.36 MC_ReadActualTorque_ISD51x
Variable
name
Data
type
Default
value
Description
VAR_IN_OUT
Axis AXIS_REF_ISD51x Reference to the axis.
See
chapter 6.5.4.1 AXIS_REF_IS
D51x.
VAR_INPUT
Enable BOOL FALSE Get the value of the
parameter continuously
while enabled.
VAR_OUTPUT
Valid BOOL The function block has a
valid output.
Busy BOOL The function block is not
nished and new output
values are to be expected.
Error BOOL An error has occurred
within the function block.
ErrorInfo DD_ERROR_ISD51x Error identication and
instance identier.
See chapter 6.5.2.3 Error
Indication.
Torque INT The value of the actual
torque or force [per
thousand of rated torque].
Table 6.14 MC_ReadActualTorque_ISD51x
Programming
VLT
®
Integrated Servo Drive ISD
®
510 System
184 Danfoss A/S © 01/2017 All rights reserved. MG36D102
6
6

 Loading...
Loading...







