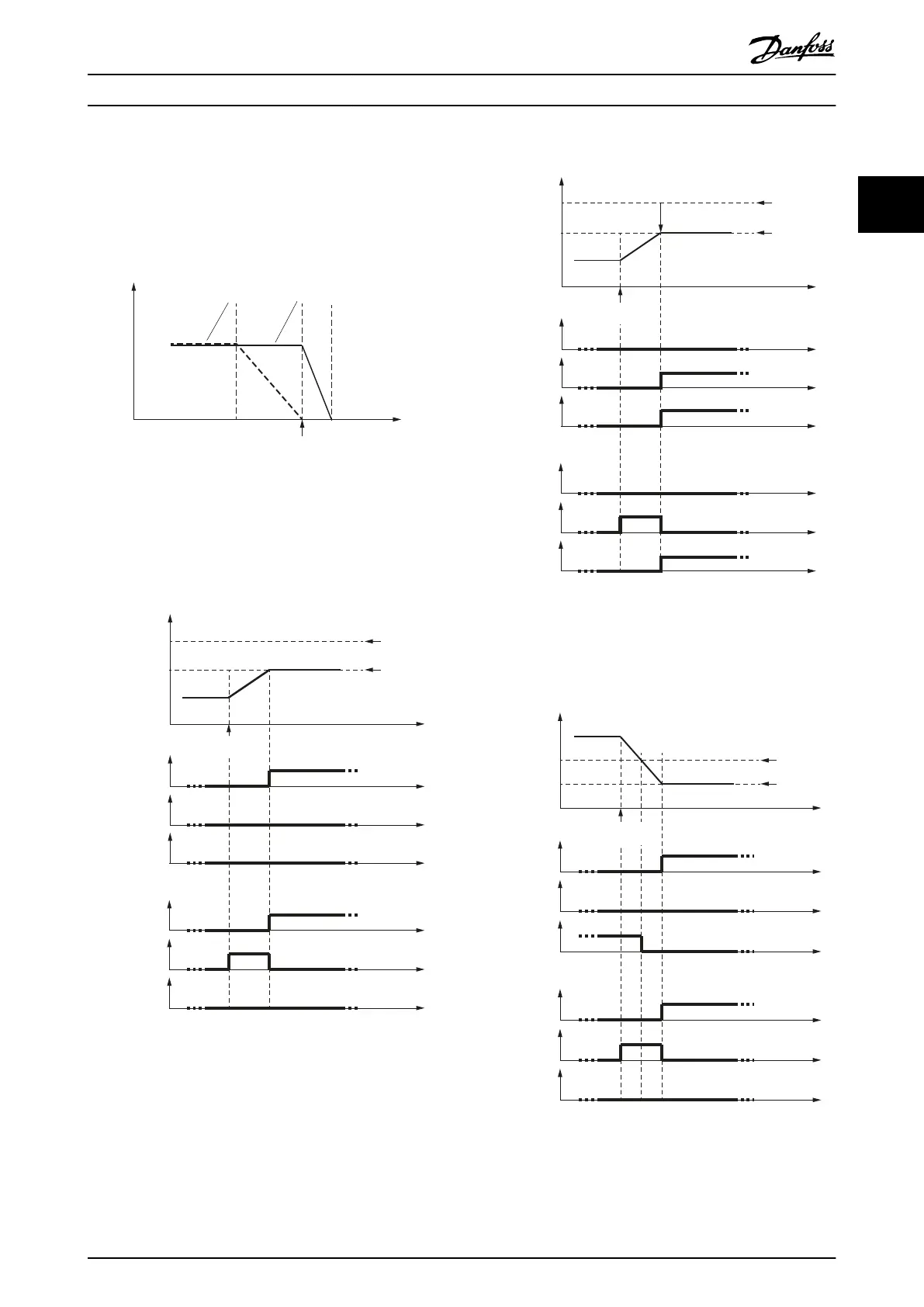
the software position limit. In all other modes of operation,
the servo drive immediately ramps down using the Quick
stop deceleration value (see chapter 7.5.9 Parameter 50-13:
Quick Stop Deceleration (0x6085)) when the software
position limit is passed. This means that the servo drive
always stops after the Software position limit.
Position
Software
position limit
Velocity
Quick-stop
deceleration
Prole
deceleration
130BF160.10
Position
controlled
Velocity
controlled
Illustration 2.4 Software Position Limit
Illustration 2.5 to Illustration 2.9 show the behavior of the
servo drive around the position limits.
Target
reached
Position
Command
Error
Positive software
limit active
Done
PLC
Fieldbus
Busy
Error
Positioning
command
Time
Software
position limit
Target
position
130BF161.10
Illustration 2.5 Normal Positioning: Target Position is in the
Valid Position Range
Target
reached
Position
Command
Error
Positive software
limit active
Done
PLC
Fieldbus
Busy
Error
Positioning
command
Positioning only to
Software position limit
Time
Target
position
Software
position limit
130BF162.10
Illustration 2.6 Position Command: Target Position is Behind
the Software Position Limit
Target
reached
Position
Command
Error
Positive software
limit active
Done
PLC
Fieldbus
Busy
Error
Positioning
command
Software
position limit
Target
position
Time
130BF163.10
Illustration 2.7 Servo Drive is Outside the Valid Position Limit
and the Target Position is in a Valid Area
Servo Drive Operation Programming Guide
MG36D102 Danfoss A/S © 01/2017 All rights reserved. 23
2 2

 Loading...
Loading...







