A-34
APPENDIX
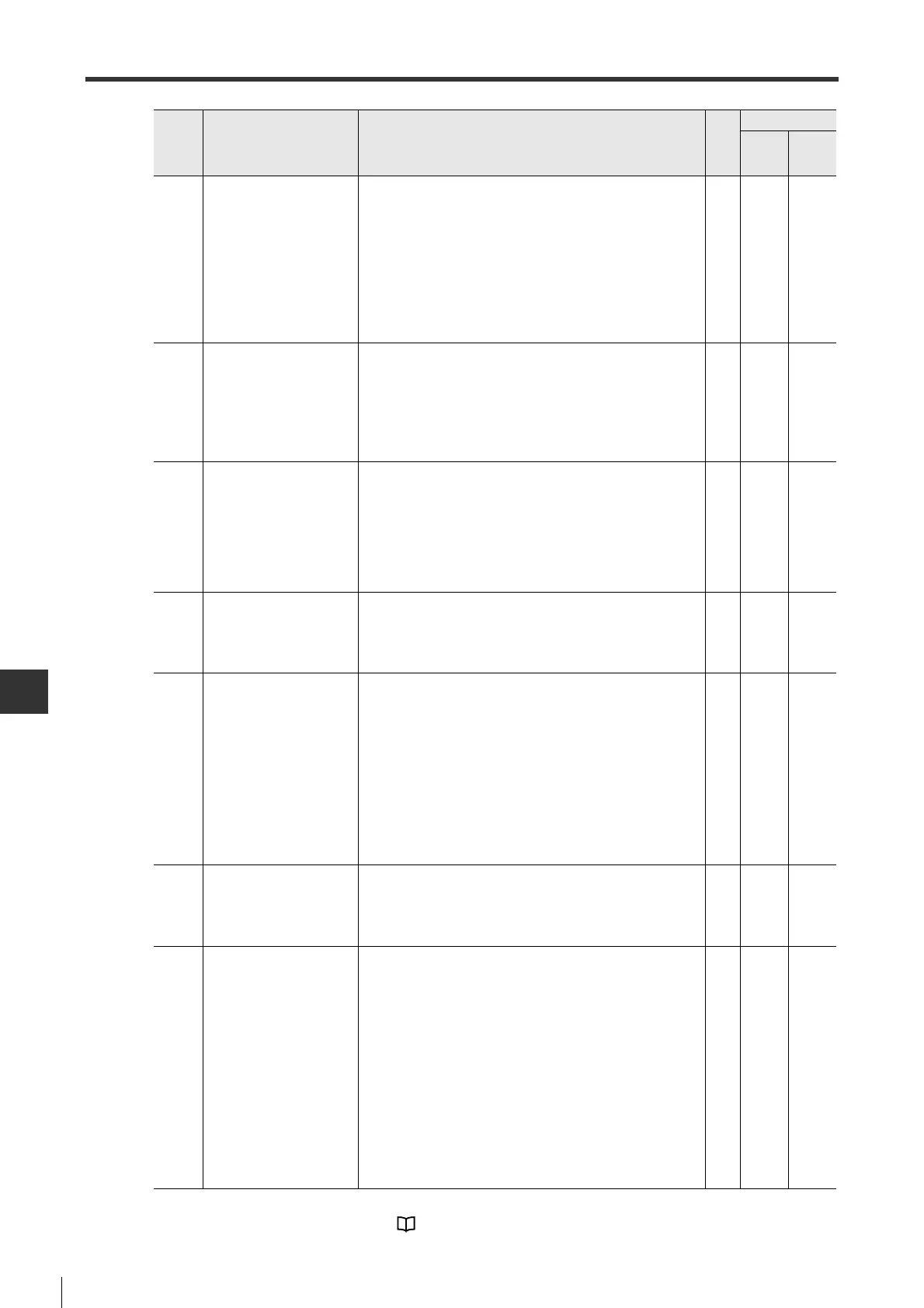
A-4List of Alarm/Warning Messages
- SV Series User’s Manual -
C90
*Encoder comm error 1
(*Enc Comm Error 1)
Communication error occurs between encoder and servo
amplifier.
(1) Please check whether the following problems exist in
encoder wiring.
· Connector is disconnected or poor in contact.
· Wrong wiring.
· Encoder cables are too long or thin.
(2) Misoperation occurs due to noise. Please keep away from
noise source (such as electromagnetic switches) when in
use.
Please contact the nearest sales agent of our company when
the founded problem can't be solved even if the power supply
of control circuit is ON again.
G1
○○
C91
*Encoder comm error 2
(*Enc Comm Error 2)
Communication error occurs between encoder and servo
amplifier.
Misoperation occurs due to noise. Please check whether
encoder cable is bundled together with wire with large current
or FG electric potential changes. Please keep the equipment
grounded while checking the laying status of encoder cables.
Please contact the nearest sales agent of our company when
the founded problem can't be solved even if the power supply
of control circuit is ON again.
G1
○○
C92
*Encoder comm error 3
(*Enc Comm Error 3)
Communication error occurs between encoder and servo
amplifier.
(1) Misoperation occurs due to noise. Please keep away from
noise source (such as electromagnetic switches) when in
use.
(2) Strong vibration is applied to encoder. Please reduce the
vibration of mechanical system.
Please contact the nearest sales agent of our company when
the founded problem can't be solved even if the power supply
of control circuit is ON again.
G1
○○
CA0
*Encoder comm error 4
(*Enc Comm Error 4)
Internal parameter error occurs for encoder.
Misoperation occurs due to noise. Please keep away from
noise source (such as electromagnetic switches) when in use.
Please contact the nearest sales agent of our company when
the founded problem can't be solved even if the power supply
of control circuit is ON again.
G1
○○
CB0
*Encoder comm error 5
(*Enc Comm Error 5)
Communication error occurs between encoder and servo
amplifier.
(1) Please check whether the following problems exist in
encoder wiring.
· Connector is disconnected or poor in contact.
· Encoder cables are too long or thin.
· Wrong wiring.
(2) Misoperation occurs due to noise. Please keep away from
noise source (such as electromagnetic switches) when in
use.
(3) Strong vibration is applied to encoder. Please reduce the
vibration of mechanical system.
Please contact the nearest sales agent of our company when
the founded problem can't be solved even if the power supply
of control circuit is ON again.
G1
○○
CC0
*Encoder comm error 6
(*Enc Comm Error 6)
Internal data error occurs for encoder.
Misoperation occurs due to noise. Please keep away from
noise source (such as electromagnetic switches) when in use.
Please contact the nearest sales agent of our company when
the founded problem can't be solved even if the power supply
of control circuit is ON again.
G1
○○
D00
Excessive error
(Exc
essive Erro
r)
Position deviation exceeds deviation excessive alarm level
"ALM_07".
(1) Command frequency and the generated deviation are too
large. Please re-check and change the input frequency,
acceleration/deceleration time, gain and set value of
electric gear ratio.
(2) Load inertia is too large. Please re-check and change load
and motor capacity.
(3) Electromagnetic brake is not released. Please check
electromagnetic brake.
(4) The motor is mechanically locked or machine is impacted.
Please check mechanical system.
(5) Incorrect wiring exist among U, V and W phase of servo
amplifier and servo motor. Please check wiring.
(6) Motor is rotated due to external force (i.e. gravity) at stop.
Please check the status at stop.
7) The set value of deviation excessive alarm level "ALM_07"
is smaller relative to operating condition. Please re-check
and change the set value.
G1
○○
*1 For alarm marked with "*",control circuit power needs to be restarted after setup.
*2 For details about stop method, see "5-2 Common Function Setting", Page 5-4.
*3 ML-II is the short name for MECHATROLINK-II and PLS the pulse/analog input type.
Alarm code
Alarm
*1
(words in () dislayed
in Access Window)
Alarm description and Correction
Stop
method
*2
Enable type
*3
ML-II PLS
 Loading...
Loading...