A-46
APPENDIX
A-5MECHATROLINK-II Communication Commands
- SV Series User’s Manual -
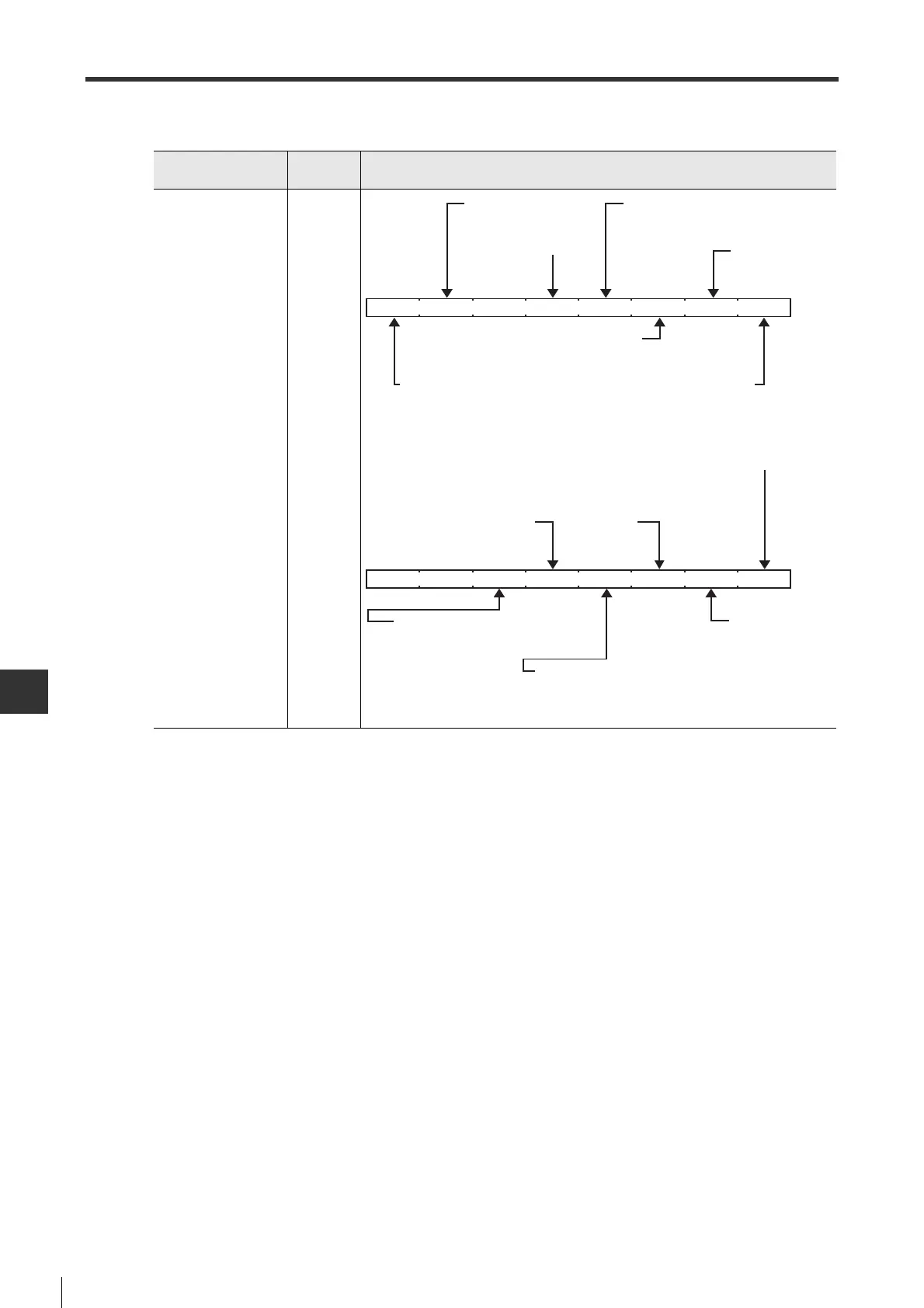
■Status-related data field
*1 During operation, if the servo amplifier is in the following status when it is not executing the MECHATROLINK
command, the SV series may go into positioning complete status (PSET=1).
· Due to a warning (ALM=1 of STATUS), it will be in servo OFF status (SVON=0 of STATUS).
· Due to main circuit power OFF (PON=0 of STATUS), it will be in servo OFF status (SVON=0 of STATUS).
· Due to the limit switch (LSP=1 or LSN=1 of IO_MON) or software limit (P-SOT=1 or N_SOT=1 of
STATUS), the motor stopped.
In this case, even if PSET=1, it is also possible that the motor has not reached the target coordinate specified
by the higher-level equipment. Check whether the axis is stopped at safe position by checking feedback
position (APOS).
Data field
Data
length
Data
STATUS
(Status)
2Byte
7
0
0
15
8
00
PON (Main power supply)
0 : OFF
1 : ON
WARN (Warning)
0 : Not occurred
1 : Occurred
PSET
*1
(during position control)/V_CMP (during speed control)
(Positioning complete/Speed match)
0 : Out of range/not matched
1 : Within the range/matched
ZPOINT (Origin position)
0 : Out of range
1 : Within the range
SVON (Servo ON)
0 : Servo OFF
1 : Servo ON
CMDRDY (Command acceptance)
ǂǂǂǂ 0 : Disable
ǂǂǂǂ 1 : Enable
ALARM (Alarm)
ǂǂ0 : Not occurred
ǂǂ1 : Occurred
P-SOT (CCW software limit)
0 : Not detected
1 : Detected
DEN (during position control)/ZSPD (during speed control)
Pulse output/Zero speed
0 : Pulse output in progress/Not detected
1 : Pulse output complete/Detected
L_CMP (Latch)
0 : Not completed
1 : Completed
N-SOT (CW software limit)
ǂǂ0 : Not detected
ǂǂ1 : Detected
NEAR (during position control)/V_LIM (during torque control)
(Positioning approximation/Speed limit)
ǂǂ0 : Out of range/Not detected
ǂǂ1 : Within the range/detected
T_LIM (Torque limit)
ǂ0 : Not limited
ǂ1 : Limited
 Loading...
Loading...