VA Motion Controller Programming Manual
126
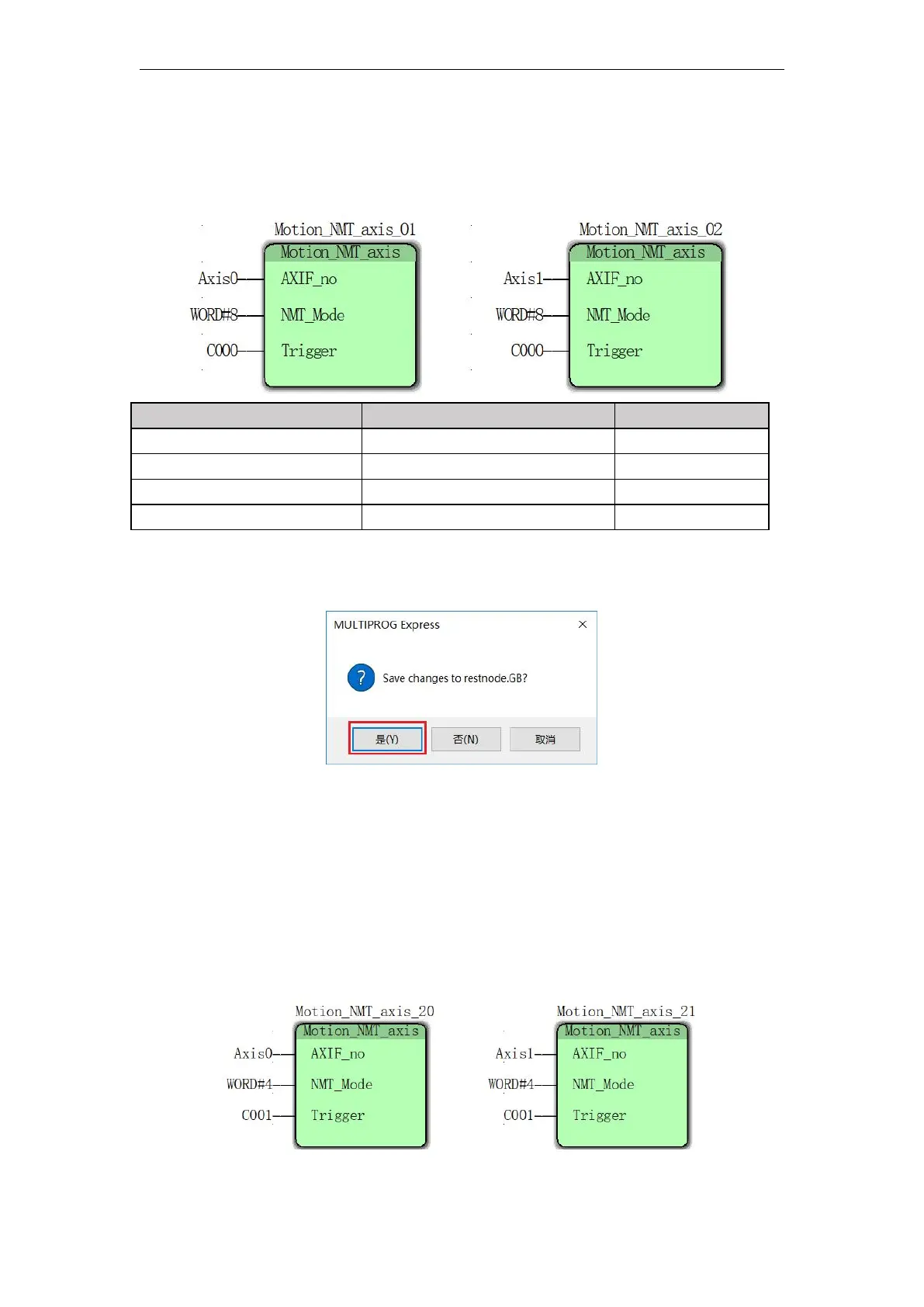
pop up to define the variable name and data.
Type, usage, the initial value and the like; input pin bit fill in the following FIGS. , Except
that ADifferent number axis (axis number of fill at
the Axis 1
, the initial value is
1
, the
representative node
2
), the remaining variable fill the axis
0
same ;
After filling in, click to close the window, pop up the dialog box to save it, select "Yes", as
shown below , the reset node configuration ( r esetnode ) process of node 2 has been completed ;
Step 5: After completing the reset node process, return to " Main _initialconfig " and
repeat steps 2, 3, and 4 to complete the remaining configuration for node 2 , including :
master-slave node enters pre-operation mode ( Motion 402 _ assignment ), configuration
Master-slave node synchronization cycle and master-slave process data configuration
(( M otion_configPDO )), start bus ( S tartall ). The added modules have the same axis number
( Axis 1 ), and the remaining variables are filled in the same way as axis 0 ;
Pre-operation mode ( Motion 402 _ assignment ):
Configure the master-slave node synchronization period ( M otion_configPDO ):