VA Motion Controller Programming Manual
127
Start bus (
S tartall
):
Step 6: After completing all the process configuration, click on the production and confirm
that it is correct. At this point, the
CANopen
communication configuration of node
2
(
Axis 1
) has
been completed ;
Step 7: Double-click the project tree "logic
POU
under" "the
main
", return to the main
program interface, you can write a program to start the movement .
(
3
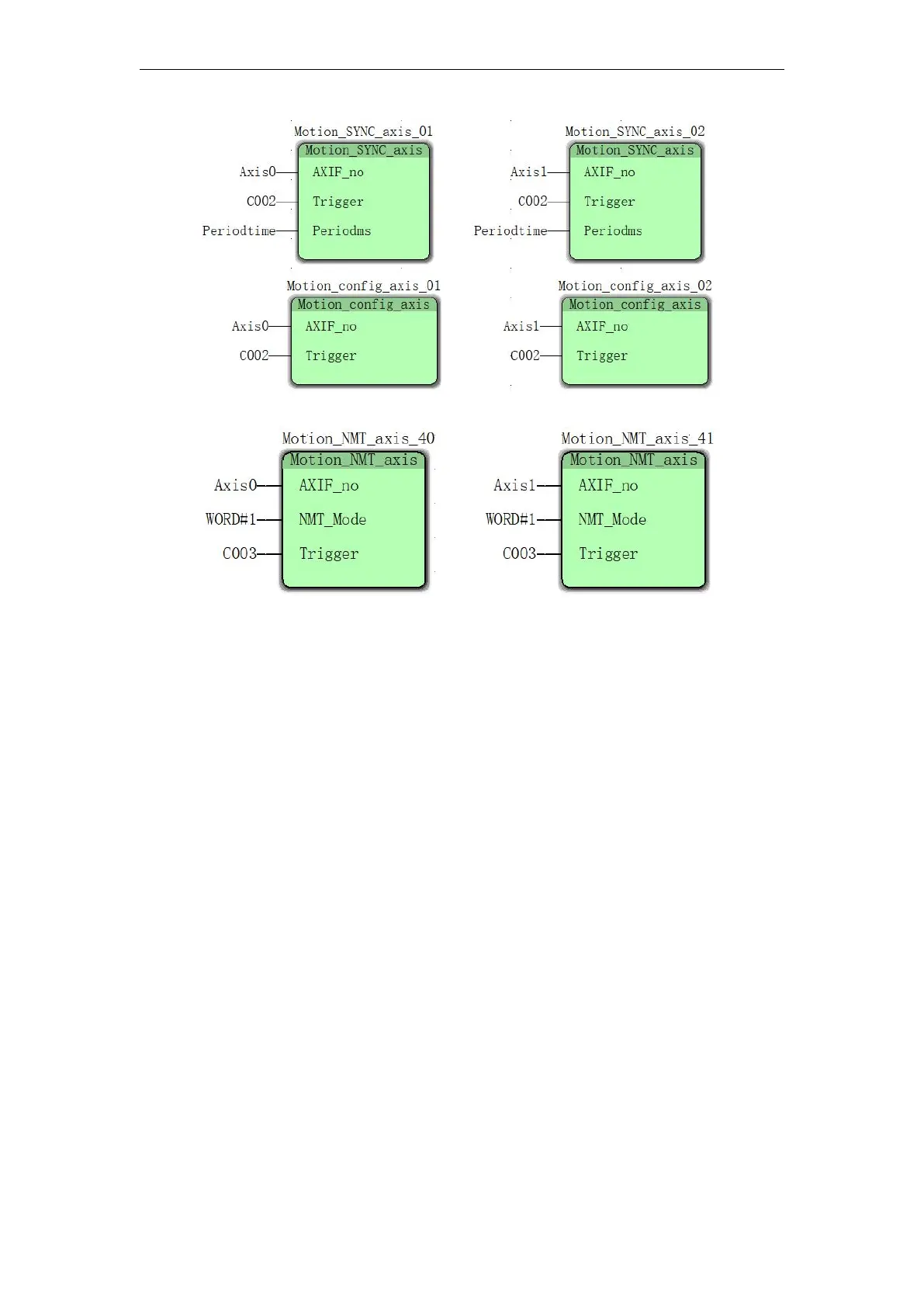
) Writing a program
Step1: entering the "
main
" programming interface, in
FB_FU_LI
selected motion control
library "
the MC _ AXIS_REF-
" die block, hold the left mouse drag to the programming interface,
and then let go, the module will pop The properties requires the module name, generally keep the
default, click "OK", as shown, insert two "
the MC _ AXIS_REF-
" die block ;