VA Motion Controller Programming Manual
298
output instruction is TRUE
Error Error code when
execution instruction
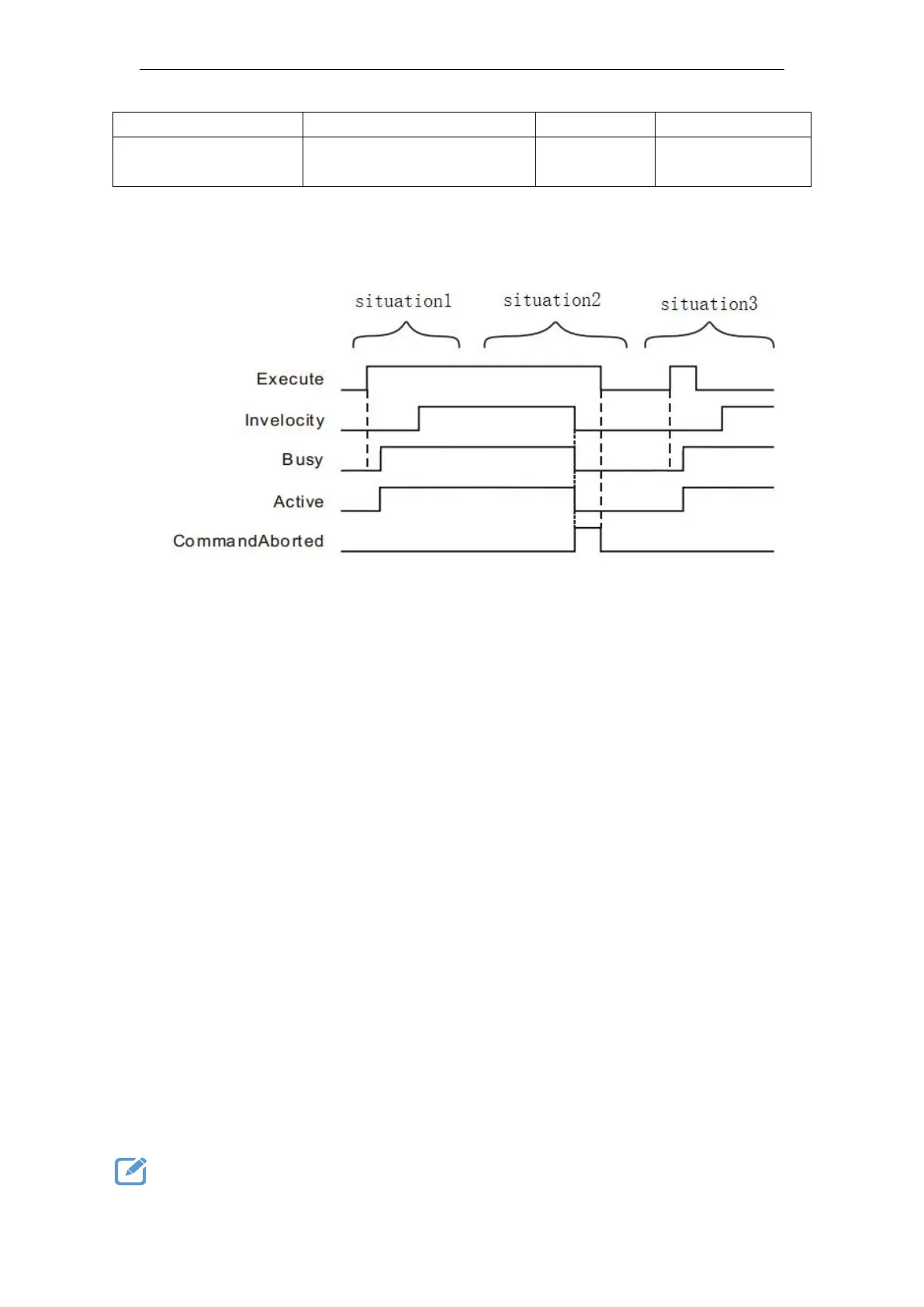
FIG timing variation output parameter
Case 1: When the Execute FALSE to TRUE, after a period, Busy, Active becomes TRUE.
When the speed of arrival, Invelocity becomes TRUE, while still Busy and Active remains TRUE
state.
Case 2: When Execut is TRUE, the instruction is interrupted when the other instruction,
CommandAborted becomes TRUE, while Invelocity, Busy and Active becomes FALSE, when a
TRUE to FALSE Execute, CommandAborted becomes FALSE.
Case 3: In the course of instruction execution, when the Execute TRUE to FALSE, after
reaching the speed, InVelocity becomes TRUE, the Busy remains to TRUE and the Active state.
Function Description
The instruction to execute upon the Execute FALSE to TRUE. If the instruction is no transfer
of command, regardless of whether the instruction is executed, the Execute again when the
FALSE to TRUE, the command can be executed again, this time to re-pin the parameters in
force include Velocity, Acceleration, Deceleration, Jerk, Direction, BufferMode ;
When you modify Velocity speed value of the controlled axes, you need to re-trigger Execute,
speed can be changed;
When the instruction is executed after the completion, i.e. the Invelocity FALSE to
TRUE, even by changing the target speed command MC_SetOverride, Invelocity this time
remains to TRUE. When MC_MoveVelocity not completed, i.e. InVelocity to FALSE, by
changing the target speed command MC_SetOverride Upon reaching the new target speed,
only the InVelocity FALSE to TRUE.
Examples of a program