VA Motion Controller Programming Manual
394
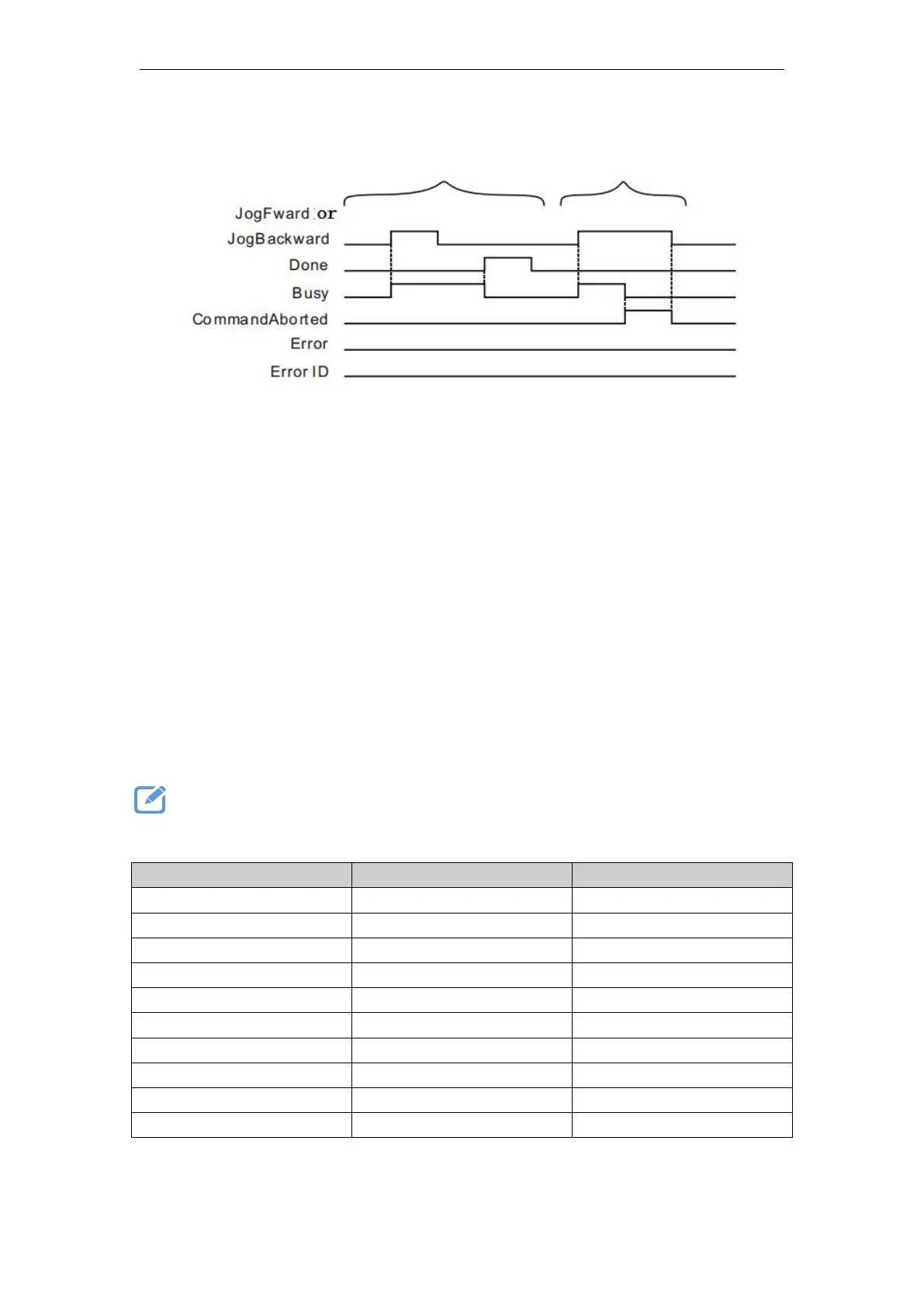
FIG timing variation output parameter
Case 1:When JogForward or JogBackward a FALSE to TRUE, Busy becomes TRUE. When
the movable stop point, the shaft speed is reduced to 0, Busy becomes FALSE, and at the same
time maintaining a Done period becomes TRUE.
Case 2:When a JogBackward JogForward or FALSE to TRUE, the instruction is interrupted
by other instruction,
CommandAborted becomes TRUE, the Busy becomes FALSE; or when JogForward
JogBackward changed by TRUE FALSE, CommandAborted becomes FALSE.
Function Description
This instruction is used to specify a given axis overlay jog speed, JogForward is
TRUE controlled axis overlay a forward jog speed, JogBackward is TRUE controlled axis
overlay a reverse jogging speed. When superposed jog speed reduced speed 0, Done after a
period TRUE to FALSE
This instruction does not affect the current state machine.
Program Example
When the instruction following examples NS_MC_Jog performed separately:
1, variables, and procedures